广州城市理工学院
一.引言
钢结构攀爬机器人(Climbing Robots for Steel Structures)是一种专门设计用于在复杂环境中攀爬和执行任务的机器人系统。随着科技的不断进步和创新,钢结构攀爬机器人已经取得了显著的发展,并且呈现出巨大的应用潜力。钢结构攀爬机器人需要具备稳定的攀爬能力,能够在各种环境中稳定地移动和工作;需要具备智能的高度感知计算能力,能自主地感知环境,规划路径,避开障碍,完成任务;需要具备强大的工作能力,能完美执行各种复杂的工作任务,如喷涂、焊接等。本文将对钢结构攀爬机器人的关键技术进行综述,包括智能控制、焊接技术、喷涂系统、攀爬技术等方面。
二.攀爬机器人的发展历程
攀爬机器人的发展可以追溯至几十年前,最初的技术受限,设计往往简单粗糙,功能极其有限。随着技术的不断进步,攀爬机器人逐渐向智能化、精准化方向发展,相关技术也在横向发展。技术人员不断探索新的材料、传感器和控制系统,用来提高机器人的总体性能和在各环境中的适应能力。
三.攀爬机器人的发展历程可分为几个阶段:
1.20世纪上半叶至20世纪末
在初期,攀爬机器人的设计简单,功能有限,仅仅用于执行一些比较基础的攀爬任务。机器人的移动方式和控制系统比较简陋,受限于当时的技术和材料条件,机器人的适应性和稳定性并不可观。
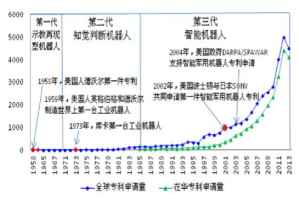
2.21世纪初至2010年左右
![]() 传感器技术和控制系统的改进,迎来新的机遇,攀爬机器人逐渐具备了更强的定位和导航能力。
传感器技术和控制系统的改进,迎来新的机遇,攀爬机器人逐渐具备了更强的定位和导航能力。
3.2010年至今
目前,攀爬机器人已经实现了一定程度的智能化和自主化。机器学习和深度学习技术的应用,机器人已经可以通过不断优化自身的行为策略,这种自我优化的能力使得攀爬机器人在长期运行中逐渐提高其工作效率和准确性。与此同时,采用新型轻质高强度的材料可以使得机器人更轻盈、更敏捷,同时保持其结构的坚固稳定。加上先进的传感器技术为攀爬机器人提供了更加丰富和准确的环境信息。[5]
1.建筑维护
在建筑维护领域中,钢结构攀爬机器人扮演着高空作业的高效替代者。它们能够在建筑物的外墙上自由移动,有着人工不可及的灵活度,执行清洁、涂装和检测等任务,显著提升了作业效率,并且大幅降低了人工高空作业所带来的安全风险。
2.桥梁检测
在桥梁检测领域,钢结构攀爬机器人能够沿着桥梁结构进行攀爬,利用集成的传感器对桥梁的完整性进行全面检查。它们能够及时发现并处理结构性的缺陷和损伤,为桥梁的维护和修复提供关键的实体数据支持,确保日常的交通安全。
四.攀爬技术:
 攀爬机器人一般由附着机构、驱动机构以及移动机构组成,通过所属环境采取不同的攀爬技术,根据目前攀爬机器人所采用的附着方式,可以整理出以下攀爬技术。[2]
攀爬机器人一般由附着机构、驱动机构以及移动机构组成,通过所属环境采取不同的攀爬技术,根据目前攀爬机器人所采用的附着方式,可以整理出以下攀爬技术。[2]
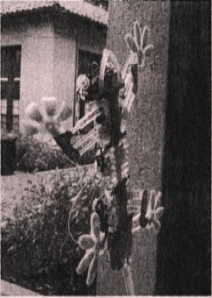
1环抱攀爬
同样附着机构上有一组或多组可以环抱的臂或爪,通过钢结构环抱和松开,使机器人能够在高空环境中稳定地移动和工作。。
特点: 结构稳定, 负载能力强. 不足: 灵活性较差, 难以在狭窄的空间内攀爬. 代表性研究: 美国斯坦福大学的“壁虎”机器人
![]()
2缠绕攀爬
这类的攀爬机器人采取缠绕原理。它们通常有数根可以缠绕的线或带,通过对附着物的缠绕和解缠,来进行位移以及工作。这种类型的攀爬机器人可以在复杂的环境中稳定的工作,但是需要较高的技术水平才能设计和制造。
特点: 具有良好的灵活性、复杂环境适应性, 能够在光滑的表面攀爬. 不足: 结构相对复杂,控制难度较大. 代表性研究: 仿蛇缠绕式攀爬机器人[3]
3 杠杆原理攀爬
这种攀爬机器人利用杠杆原理来实现攀爬,通过机械臂的伸缩来改变力臂实现攀爬.。该附着机构通常有一组或多组杠杆结构,通过改变杠杆的角度和位置,使机器人能够在复杂环境中稳定地移动和工作。杠杆原理攀爬机器人设计简单,操作方便,但仍然需要提供较大的动力才可攀爬。
特点: 结构简单, 易于控制. 不足: 负载能力较小, 难以适应复杂的环境. 代表性研究: 卡内基梅隆大学的研究人员开发的RiSE机器人。
2.5桁架攀爬

![]()
这种类型的攀爬机器人利用桁架原理来实现攀爬。它们通常有一组或多组可以伸缩的桁架,通过伸缩和固定,从多个水平和垂直支撑构成,形成了稳定的网格状框架,让机器人能够在各种环境中稳定地移动和工作。桁架攀爬机器人可以在大范围内工作,但可能需要较大的空间才能操作, 仿生桁架攀爬机器人主要以仿尺蠖结构设计为主。[3]
技术二:喷涂系统
钢结构攀爬机器人的喷涂系统包括喷涂设备、喷涂控制系统等组成部分。喷涂设备通常采用喷枪或喷雾器等形式,主要通过控制气压、喷涂速度等参数来实现喷涂作业。喷涂控制系统则负责控制喷涂设备的运行,确保喷涂涂层的均匀覆盖。
1喷涂控制系统
喷涂控制系统负责控制喷涂设备的运行,其中包括控制喷涂速度、气压、喷涂角度等参数。良好的喷涂控制系统可以确保涂料均匀喷涂在钢结构表面上,避免出现漏喷、重喷等情况。
2涂料供给系统
涂料供给系统用于将涂料从涂料桶或容器中输送到喷涂设备中,确保喷涂作业的顺利进行。这包括涂料输送管道、泵等设备,需要具备稳定的涂料供给能力。
3喷涂效果监控
喷涂系统通常还包括喷涂效果的监控功能,例如通过摄像头、传感器等监测喷涂涂层的均匀性和质量,及时调整喷涂参数以保证涂层质量。
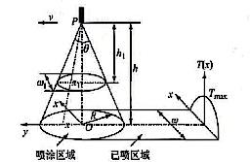
4喷涂轨迹规划技术
自动喷涂轨迹规划是确保涂层均匀分布的关键。利用计算机辅助技术(CATP),根据工件的CAD模型自动进行喷涂路径规划,并且基于视觉的自动编程技术、以及考虑喷涂工艺参数的轨迹优化方法。能大幅提高复杂形状表面喷涂路径规划及喷涂质量。[7]
![]()
![]()

技术三:智能控制
钢结构攀爬机器人具备智能控制系统,能够实现自主识别、辨别钢结构表面的状态,根据实时情况来调节喷涂参数以适应不同表面的喷涂需求。智能控制还包括与中控系统的通讯,能实现远程监控和操作,提升作业效率和安全性。
1传感器技术
智能控制系统中感知与定位是非常重要的一环需要整合多种传感器技术,例如激光测距、摄像头视觉识别等,以实现对周围环境和机器人自身位置的准确感知和定位。这些传感器将提供实时的数据,帮助机器人准确定位并理解周围环境,从而做出相应的决策。
2路径规划技术
基于传感器的数据,智能控制系统具备高效的路径规划和导航算法,以确定最佳的移动路径并安全快速地导航攀爬机器人在钢结构表面上移动。这些算法不仅考虑到钢结构表面的特殊形状、也需要考虑倾斜度以及各种障碍物,确保机器人能够高效、稳定地高空作业。
3离线编程技术
离线编程(OLP)系统利用计算机图形学建立机器人及其工作环境的模型,通过仿真分析传感器的数据的实时数据,通过规划算法对行进轨迹进行规划,并实时更新轨迹路线。
技术四:焊接技术
1焊接电源技术
材料更新迭代、技术算法优化使电源技术正向高效化、数字化、智能化、机器人化和绿色化方向发展。通过新电源技术出现了超低飞溅焊接、高速焊接等技术,电源控制响应速度能达到微秒级甚至更快更高效,输出电流、电压可自行调节,在实际应用上更为适用。焊接电源品牌如Fronius、EWM、CLOOS、Lincoln、Miller、Panasonic、OTC等推出了系列化产品。[1]
2智能焊接技术
其核心是焊缝信息自动获取、焊接顺序规划、焊接参数自动规划、焊接路径自动规划等。
而且焊缝检测过程需要在短时间内完成,不仅需要对整体机构进行模块化设计,还需要各个模块之间能快速连接以缩短装配时间。[9]
2焊接机器人传感技术:
传感技术是实现焊接自动化与智能化的关键,包括接触传感、温度传感、电磁传感、声学传感、光学传感、电弧传感等。[1]
1接触传感
接触传感分为低压传感和高压传感两种,光洁度较高、导电性较好的工件一般采用低压触感,表面有氧化皮、锈蚀等异物、导电性较差的工件采用高压接触传感更为可靠。
主要用于焊接初始位置识别和焊枪碰撞检测,效率较低但适应性好。
2电弧传感
电弧传感是利用焊丝与工件之间的距离变化探测焊丝高度和左右偏差,从而判定焊缝中心位置,实现焊接过程中焊缝实时跟踪,硬件结构简单成本低、响应快,但可靠性受多种因素影响。
技术挑战与展望
钢结构攀爬机器人在喷涂焊接领域仍面临着一些挑战,例如复杂钢结构表面的处理、喷涂涂层厚度的控制等问题。但是它能替代人类完成大量高空危险或者不可完成的工作,因此钢结构攀爬机器人必将拥有更广阔的前景未来,随着传感技术、人工智能等领域的进步,钢结构攀爬机器人的技术将不断完善,实现更高效、精准的作业。[4]
.1. 智能化
马斯克开源Grok-1,3140亿参数迄今最大,权重架构全开放,将数据库开源,它的规模和开放性使得更多的研究人员和开发者能够利用它,会对人工智能领域产生重大影响,领域的发展会将钢结构攀爬机器人越来越智能化。未来钢结构攀爬机器人将具备自主决策、自我学习和自我优化的能力,能够根据作业环境和任务自主调整喷涂、焊接等操作,提高作业效率和质量。
2.多功能化
攀爬机器人逐渐实现多功能化、功能一体化,除了喷涂和焊接领域之外,在其他领域会有更多的建树,能够进行检测、测量、搬运等多种作业任务。这将大大提高机器人的作业效率和应用范围,使其在建筑、造船、化工等领域得到更广泛的应用。
。
结论
钢结构攀爬机器人在喷涂领域的技术发展为钢结构维护带来了全新的解决方案,提高了作业效率、降低了安全风险,具有广阔的应用前景。随着技术的不断创新和完善,钢结构攀爬机器人将在喷涂领域展现出更大的潜力,助力钢结构维护领域的发展。
文献
[1]霍厚志,杨朔,刘龙飞,等.我国焊接机器人应用现状及关键技术概述[J].焊管,2023,46(05):1-7+28.DOI:10.19291/j.cnki.1001-3938.2023.05.001.
[2]操港归. 钢结构建筑磁吸附攀爬机器人研发与工程分析[D].湖南大学,2024.DOI:10.27135/d.cnki.ghudu.2022.002713.
[3] 陈昌银, 黄彪, 刘袁, 赵廷杰, 喻启旺. 爬杆机器人研究现状[J]. 人工智能与机器人研究, 2021, 10(2): 111-122.
[4] 黄龙, 张卫华, 陈今茂, 管金发, 王建超, 王耀辉. 爬壁机器人的研究现状与发展趋势[J]. 机械工程与技术, 2021, 10(3): 345-363
[5] 吴林, 张广军, & 高洪明. (2006). 焊接机器人技术. 中国表面工程, 19(Z1), 29-35.
[6] 王学武, 汤彬, & 顾幸生. (2019). 焊接机器人避障策略研究. 机械工程学报, 55(17), 77-84.
[7] 刘亚军, 訾斌, 王正雨, 游玮, & 郑磊. (2022). 智能喷涂机器人关键技术研究现状及进展. 机械工程学报, 58(7), 53-74.
[8] 齐有泉, 李艳文, 陈子明, 孔繁栋, 杨晓坤, & 朱为国. (2020). 串联九自由度喷涂机器人及其运动学分析. 机械工程学报, 56(23), 165-171.
[9] 程保良, 赵众集, 荣健, 林文峰, 高雪官. 焊缝检测机器人送入装置及控制系统的设计[J]. 机械工程与技术, 2018, 7(5): 298-308.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



