沈阳城市建设学院,辽宁沈阳 110167
【摘 要】:随着物流行业的快速发展,物流搬运工作越发需要更高效率的工作方式,因此解决对物品进行分拣搬运的问题显得尤为重要。该设计基于Arduino UNO单片机,运用单片机技术以实现对物流搬运小车的控制,该套系统具有循迹、避障、二维码识别、机械臂抓取以及视觉识别、定位的功能。
【关键词】:Arduino;搬运小车;机器视觉技术;
【项目来源】:2021年沈阳城市建设学院机械工程训练综合能力竞赛。
整体方案设计
该套方案采用Arduino单片机为主控制器。Arduino是一款便捷灵活、方便上手的开源电子原型平台,主要包含两个的部分:硬件部分是可以用来做电路连接的Arduino电路板;另外一个则是Arduino IDE,可以在计算机中的程序开发环境。该套设计可分为三个部分:行走部分、视觉部分、抓取物料部分。
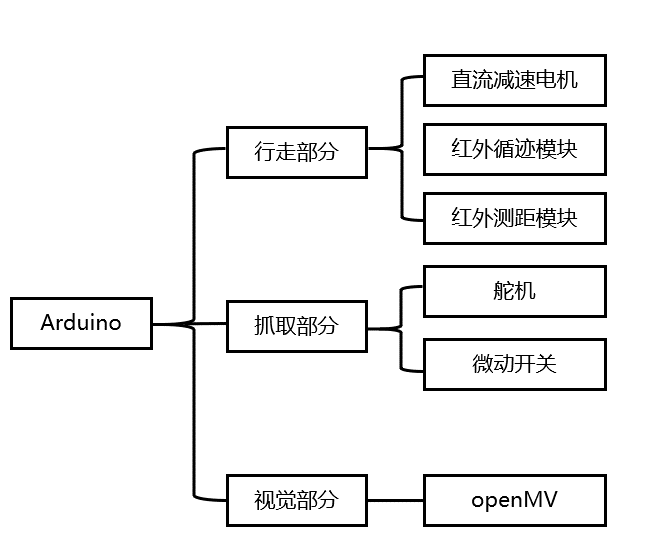
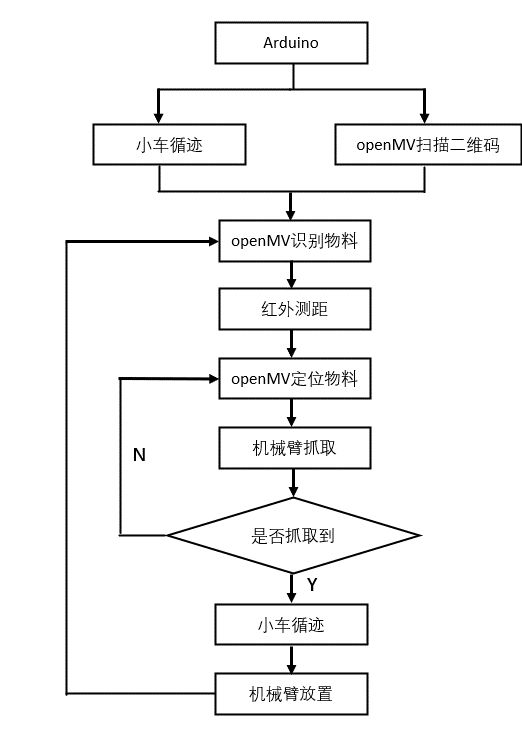
小车通过循迹模块沿黑线行驶,摄像头通过扫描二维码领取任务将任务传给单片机,小车继续沿黑线行驶直至摄像头捕获要抓取的物体,通过红外测距模块使小车行驶至机械臂抓取范围停止,摄像头对物料进行颜色、形状的识别以及定位,机械臂根据所获取的信息按照任务抓取物料,并带至物料区。
各部分方案设计
行走部分、视觉部分以及抓取部分均通过串口通信实现数据的传输。
(1)、行走部分
循迹模块采用的是红外光电对管,是专门用来接收和感应红外线发射管发出的红外线光线的。基于以上原理,循迹检测电路工作过程是:发射管发送红外光,发射管发出的红外光强恒定,由于黑线与周围颜色对红外光的反射效果不一样,红外接收管检测到反射红外光的强度不一样,使流过红外接收管的电流强度出现变化,通过电阻形式的电流转电压电路,将变化的电压值输入到STM32处理器的模数转换器端錺口,通过处理器芯片内部ADC转换后得到相应数字量,根据该数字量的不同分析黑色线条及周边情况。通过采集的数据并加以PID控制的辅助对小车进行驶达到较好的循迹效果。
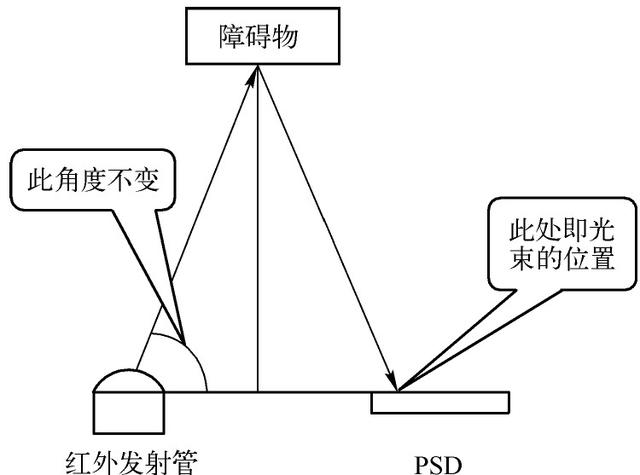
红外测距模块,红外发射管发出的光束,遇到障碍物反射回来,落在PSD上,构成了一个等腰三角形,借助于PSD可以测得三角形的底,而两个底是固定的,由发射管确定,此时便可以通过底边推算出高,即我们所测的距离。
(3)、视觉部分
OpenMV是一个可编程的摄像头,内置了一块STM32芯片,通过MicroPython语言进行编程,具有良好的开源环境,以及可以对图像进行多种处理和分析。在本次设计中主要运用了对二维码的识别、对红、绿、蓝三种颜色以及球形形状的同时判别,以及对判别之后的物料进行定位。
二维码信息进行提取运用find_qrcodes()函数,在获取到任务顺序之后,开始对摄像头所识别到的物体进行预先设定好的颜色和形状进行判定,当判定成功,将信息回传至单片机开始使用红外测距模块使小车停至合适的位置,此时在对物料进行定位,通过像素坐标的转换为世界坐标,实现机械臂对物料的准确抓取。
(3)、抓取部分
机械手实体由舵机组成,四个舵机分别与Arduino相连接。舵机是精确的角度伺服电机。舵机里面安装了ー个电位器(或者其它的角度传感器)。它可以检测输出端的转动角度,从而控制舵机来实现转动,再依靠机械结构带动机械手抓取目标货物。四个舵机的使用的相互配合性,转动的角度的大小,可以事先预设值,再根据实际情况去修改或调用。
机械手爪内部,在合适的位置安装一个微动开关。微动开关是具有微小接点间隔和快动机构,当有外力作用于动作簧片上,使动作簧片末端的动触点与定触点快速接通或断开。当机械爪抓到球时外力作用于簧片上,可通过此条件判断机械爪是否抓到球。
结语
随着时代的进步、科技的发展,人们在稳定的同时更加注重效率。此次基于Arduino设计出的一款智能物流小车,运用了PID、循迹、红外等多种方法,实现了小车按照预先设想完成对物品的抓取与放置。但此设计还有很多不足的地方,仍需要改进,例如在实际中还会遇见一些特征值相似或者不够明显的物品,识别出错的概率将会大大提高。望广大机电爱好者们可以指正不足,提出妙想,集思广益做出更好的设计。
[1]越振德.多功能遥控智能小车的制作[J]电子制作,2011(04),12-16
[2] 卢贶.基于STM32F103RBT6的智能小车设计[J]湖南工业职业技术学院学报,2018,18(05) ,12-14+24
[3] 李昱、罗忠宝. 智能物流车控制系统设计[J] 吉林工程技术范学院学报2019,35(12),107-109
[4] 蒋灵龙、胡荐、刘青云. 基于OPENMV的非接触物体识别装置[J] 科学技术创新,2021,(09),160-161
通讯作者简介:陈丽娜,女 ,汉族,出生年月 1985,籍贯(省市)内蒙古赤峰市,硕士,沈阳城市建设学院,讲师,研究方向 检测技术与自动化装置。
作者简介:
张剑,男,河南省安阳市,汉族,本科,在此项目中主要负责物流小车视觉识别定位方面。
张海敦,男,四川省南充市,汉族,本科,在此项目中主要负责物流小车的程序编写与调试。
曾仁杰,男,四川省内江市,汉族,本科,在此项目中主要负责物流小车的后期调试。
赵胜,男,辽宁省抚顺市,满族,本科,在此项目中主要负责物流小车结构的绘制。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



