南宁学院 南宁 530000
摘要
遥感技术是根据电磁波的理论,应用各种传感仪器对远距离目标所辐射和反射的电磁波信息,进行收集、处理,并最后成像,从而对地面各种景物进行探测和识别的一种综合技术。作为空间地理信息系统建设的一种有效方法,在智慧城市建设中发挥着重要作用。文章通过应用遥感影像进行城市建筑物自动化分类提取方法的研究,为相关技术应用于智慧城市建设提供参考。
关键词:智慧城市;遥感影像;建筑物;自动化提取
1.研究背景
随着经济社会的高速发展,城市面貌也在发生着巨大的变化,为了更科学有效的进行城市规划、建设和管理,城市建设管理部门需要及时掌握城市建设变化情况。在远程遥感观测技术出现之前,人们主要通过工程测量等方法来收集城市信息,进行城市规划与管理。卫星遥感技术以其大范围、快速准确获取地面信息的优越性,越来越广泛应用于土地利用、城市规划与管理等领域。
在智慧城市建设中,对于建筑物的识别提取是极其重要的,如何识别建筑物从而更好的分类和提取也直接关系到建筑物提取的自动化程度。此外,由于城市建设的不断发展,城市建筑物不断更新变化,因此,对建筑物进行有效的识别与提取是一个非常关键的问题,找到一种准确高效且自动化的高分遥感建筑物提取方法来替代人工方式具有重要意义。
2.研究现状
目前的建筑物提取主要是通过利用图像特征信息来进行图像建筑物的识别以及提取。这些年来,国内外的很多学者都专注于对遥感影像建筑物进行精确识别,以及在影像上提取出建筑物等信息的研究,并且提出了很多的方法和理论,也取得了一定的成果。比如利用建筑物的位置关系对相似的建筑物进行过滤,最后通过图割算法实现对建筑物的精确提取;过Mask R-CNN算法来实现对建筑物的矢量提取;通过人工提取的方法对房屋进行提取,从而实现对建筑物房屋位置、范围等的初步自动化提取等。在国外,Janja Avbelj and Rupert Muller提出了一种新的彩色高分辨率遥感图像建筑物提取方法。该方法包括统计区域合并(SRM)分割、边界跟踪和基于新形状因子的聚类,在执行SRM后,执行边界跟踪算法,摩尔邻域轮廓跟踪算法用于此目的。
3.研究内容
易康(eCognition)是一款基于目标信息提取的软件,是世界上最先进的基于对象的图像识别提取平台之一,在一定程度上解决了传统影像分类难的问题。本文从采用目前最先进技术的遥感摄影方法和获取建筑物信息的技术研究角度,以某市一个区域的遥感影像为研究对象,在易康平台下采用不同的分类方法技术和不同参数,对遥感影像中的建筑物信息进行分类提取研究,分析建筑物提取结果的准确度,归纳建筑物在遥感影像中所具有的特征以及利用易康软件提取建筑物的方法。
4.建筑物分类提取技术路径
在易康平台下进行城市建筑物的分类提取主要包括以下步骤:
(1)遥感影像预处理。进行预处理的目的是为了消除图像中无关的信息,提高图像分辨率,从而提高遥感影像建筑物信息提取的精度。
(2)最优尺度分割参数的选择。利用选取的遥感影像,通过四种不同分割尺度参数的实验,根据目视法对分割后的遥感影像图进行对比分析,从而确定一种最优的尺度分割参数。
(3)遥感影像面向对象的分类。基于易康软件通过决策树、SVM算法和最邻近分类算法,对遥感影像对象进行分类,最终实现建筑物的提取实验,通过对比及分析三种分类方法在面向对象分类时的提取结果。
4.1遥感影像数据来源与数据预处理
4.1.1实验数据来源及研究区域概况
本文用到的遥感影像数据源自地理空间数据云,下载某市某区的Landsat-8遥感影像数据。
该研究区域中心位于东经109°21′,北纬24°19′,是一个长斧形地域布局,总面积共301平方公里。该区的遥感影像如图4-1所示。

图4-1 实验研究区域遥感影像图
4.2遥感影像ENVI处理
本文应用ENVI软件做影像的预处理。预处理是指对遥感图像系统数据在正式开始使用遥感计算机采集前必须做的一系列遥感数据预处理的工作或过程,一般包括图像裁剪、辐射定标、辐射校正、几何校正、图像切割和拼接等步骤。
5.城市建筑物分类提取方法
城市建筑物分类提取方法主要有决策树分类法、SVM(支持向量机)分类法、最邻近分类法等。
决策树分类法是一种基本的分类方法,采取了“分而治之”的思想[1],它是一种严格的“非参”的类型。决策树分类法的过程一般包括三个步骤:特征选择、决策树的生成和决策树的修剪。
通过对训练样本进行决策树学习生成决策树,决策树可以根据属性的取值对一个未知样本集进行分类,这就是决策树分类[2]。
SVM(支持向量机)算法是由Vapnik 等人于1995年提出的建立在统计学习VC维理论和结构风险最小准则的基础上的一种机器学习的算法[3]。SVM进行分类与处理分析后系统就可以实现自动化,从一个复杂的系统中的各种模型信息与建筑背景数据信息中能够更高效准确快速地提取和识别出建筑物目标,从而实现对建筑物的精确提取。
最邻近分类法指的是一种可以直接得到基于已识别给定数据特征信息的邻近数据特征空间的分布状态和样本对象特征空间的监督状态分类的研究方法。可用于快速进行对基于给定任意或者多个数据邻近的特征数据间的相关信息数据的提取。实际进行分类操作时,首先需要通过建立一个空间隶属度函数空间模型对系统进行特征分析以完成分类,影像对象的具体分类属于哪一类,由它最小隶属度值的大小来具体加以判断确定,当发现其中有某一个目标对象的所属于类的每一类中最大的那一个的隶属度值一般都至少要稍小于它所属最小类中的另外某一个最小隶属度值时,则认为该类型目标影像对象本身并就不可能会被重新加以分类,这时候就需要再定义某一种属于新类下的目标对象。
6.基于易康软件建筑物分类提取实验
6.1 影像分割
多尺度分割本质上是一种不同于传统分类方法的抽象图像压缩方法,它可以在任何尺度上生成具有相似属性信息的多边形图像。它可以保存高标签图像,以获取低标签对象的信息,从而提高信息的排序和提取,通过进行多尺度的分割操作之后,高分影像上的每种不同的地物类型信息都同时可以在两个相应分尺度上的低分影像上发生反应,因此这种多分尺度的分割操作过程通常也被人们看作是一种进行局部图像优化分析的过程,在这种多分尺度的分割过程中,颜色因子和形状因子,以及形状因子中图像的表面光滑度和图像紧致度等这四个基本参数都共同作用决定影响图像分割后的整体效果。
面向对象分类流程中最重要的一步也就是对遥感影像进行分割,需要首先将遥感影像分割调整为一个大小比较合适的对象,才可以开始进行对象分类,分割之后的效果好坏将直接影响关系到我们后续进行的建筑物模型提取,因此首先需要我们根据所研究区域的地貌特征以及需要提取到的建筑物特征,选择最合适我们的对象分割的参数,然后进行对象分割处理。通过目视比较可以发现,当分割尺度过小时,应该合并的区域没有合并;当分割尺度过大时,不该合并区域却被合并到了一起,使得同一区域内的异质性较强,从而导致目标函数值较小。当选择尺度为150时,分割的效果最好,目标函数取得极大值,因此选择该尺度为最优尺度,此时得到的对象个数为2579个。
6.2 决策树分类提取
(1)选择分类样本、训练决策树模型
通过利用易康软件的Classify selection功能,对四个地类分别选择样本。利用classifier算法,建立一个训练决策树模型,
(2)提取结果
利用classifer算法进行分类,最终提取结果如下图6-1所示。
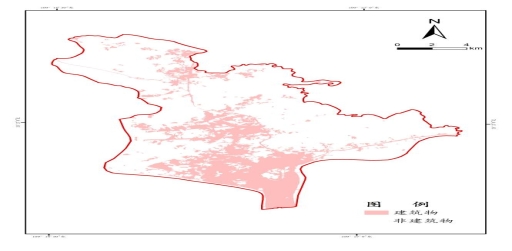
图6-1 决策树提取结果
6.3 SVM分类提取
(1)选择分类样本、训练SVM分类模型
利用易康软件的Classify selection功能,对四个地类选择样本。利用classifier算法,建立训练SVM分类模型,命名为SVM。
(2)提取结果
利用classifer算法进行分类,最终提取结果如下图6-2所示。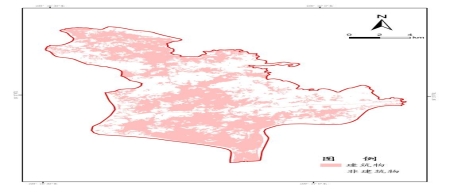
图6-2 SVM分类提取结果
6.4 最邻近分类提取
(1)创建分类体系
使用监督分类的方式,需要建立一个较为详细的分类体系来帮助选择合适的样本,依次添加不同的类别并给出不同的颜色。本实验共分为五类,分别是耕地、建筑、其他、水体、植被,创建分类体系。
(2)选择分类样本
此时需要选择哪个类别的样本,就需要保证Class Hierarchy中对应的类别可以作为样本。
(3)构建特征空间
构建特征空间,这里的所谓样本的特征空间主要指的是在进行样本监督和分类操作的时候,参与监督和分类的样本特征空间。
(4)提取结果
利用Append New,对其进行参数设置,即可执行最邻近分类。提取结果如图6-3所示:
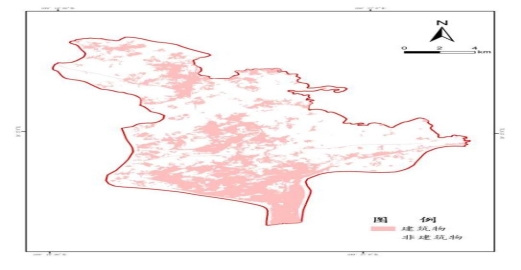
图6-3 最邻近分类提取结果
7.实验提取结果与精度评价
7.1精度评价
精度评价采用易康Developer软件中提供的(Error Matrix based on Samples)精度评价方式。kappa计算结果为-1~1,但通常kappa是落在 0~1 间。
Kappa系数因子等级表如表7-1所示。
表7-1 Kappa系数因子等级表
kappa系数因子 | 等级一致性 |
0.0~0.20 | 极低的一致性(slight) |
0.21~0.40 | 一般的一致性(fair) |
0.41~0.60 | 中等的一致性(moderate) |
0.61~0.80 | 高度的一致性(substantial) |
0.81~1 | 几乎完全一致(almost perfect) |
7.2 决策树分类法
通过图6-4决策树分类建筑物提取的结果来看,决策树分类法提取的建筑物较少,结果存在较大的差异,很多建筑物尚未提取,均归为非建筑物,因此这种方法容易造成建筑物提取的漏提,而且易产生错提等现象。
决策树分类建筑物提取的总体精度因子为0.6808,kappa系数因子为0.5825。因此决策树为中等的一致性。
7.3 SVM(支持向量机)分类法
通过图6-7 SVM(支持向量机)分类提取建筑物的结果来看,SVM(支持向量机)分类法相对于决策树分类提取的建筑物较多,但是结果仍存在差异,把非建筑物归为建筑物,因此通过SVM(支持向量机)分类提取建筑物这种方法同时存在着错提现象。
由实验结果可知,SVM(支持向量机)提取建筑物的总体精度为0.734,kappa系数为0.6022。因此SVM(支持向量机)分类为中等的一致性。
7.4 最邻近分类法
通过图6-10最邻近分类法分类提取建筑物的结果来看,最邻近分类法相对于决策树分类、SVM(支持向量机)分类提取的建筑物更为的合理,能更好的体现出建筑物与非建筑物,不会出现错提、漏提现象。
由实验结果可知,最邻近分类法提取建筑物的总体精度为0.7446,kappa系数为0.6586。因此最邻近分类法为高度的一致性。
7.5 结果分析
本次实验主要使用不同的分类方法,通过易康软件中的不同分类器进行提取,然后验证建筑物提取的准确性。我们采取客观的精度评估方式对分类提取的建筑物进行评估,客观精度分析及评价结果是指通过根据被选择的被检验分类对象样本数据或对总分类结果的分析结果数据等,进行总体分类结果精度的分析或检验,获取总体精度及Kappa系数,Kappa系数和总体精度反映出整个图件的分类精度。三种分类方法提取建筑物的精度比较表如表7-2所示。
表7-2 三种分类方法提取建筑物的精度比较表
决策树分类 | SVM分类 | 最邻近分类 | |||
Overall Accuracy | 0.6808 | 0.734 | 0.7446 | ||
Kappa Coefficient | 0.5825 | 0.6022 | 0.6586 | ||
通过监督分类对研究区域分别利用决策树分类法、SVM分类法、最邻近分类法等方法进行了建筑物分类信息提取技术的实验。通过上述提取实验最邻近分类与SVM分类、决策树分类提取结果,结合精度比较分析,可以看出最邻近法、SVM分类方法的总体精度指数和Kappa系数这两类总体精度指标均要高于决策树这种面向对象的分类方法精度,说明用最邻近法、SVM分类比决策树分类更适合用来进行建筑物的提取。
8.总结
遥感技术是一种能够通过感知目标反射或自身辐射的可见光、红外线、电磁波,对目标进行探测和识别的技术。由于遥感技术获取地面信息的速度快,周期短,同时可以更好的反映城市建筑物的发展与变化,因此基于遥感影像下的建筑物提取技术有助于智慧城市建设。
通过对一系列实验结果进行分析,得出以下结论:
(1)最优尺度分割参数的研究。利用遥感影像对四种不同分割尺度参数进行实验,多尺度分割能根据不同的地物类型,设置相应的最优尺度分割参数,根据目视法对分割后的遥感影像图进行对比分析,当选择分割尺度为150时,分割的效果最好。
(2)运用易康软件对研究区域的Landsat-8遥感影像数据进行建筑物分类提取实验与研究。通过实验结果比较分析,最邻近分类法相比较于决策树分类、SVM分类来说提取更完整,不会出现错提、漏提现象。而且最邻近分类对建筑物提取的总体精度和kappa系数均比决策树、SVM分类高,即最邻近分类能较好的对遥感影像中的建筑物进行提取。同时证明了最邻近分类在遥感影像分类提取应用中的稳定性和可靠性。
参考文献
[1]樊彦丽. 基于多特征的SVM高分辨率遥感影像分类研究[D].中国地质大学(北京),2018.
[2]申文明,王文杰,罗海江,张峰,刘小曼,熊文成.基于决策树分类技术的遥感影像分类方法研究[J].遥感技术与应用,2007(03):333-338.
[3]陈波,张友静,陈亮.结合纹理的SVM遥感影像分类研究[J].测绘工程,2007(05):23-27.DOI:10.19349/j.cnki.issn1006-7949.2007.05.007.
黄清华(1978—),男,高级工程师,长期从事工程测量教学与实践工作。
![]()

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



