(中国船舶集团公司第七一○研究所,湖北 宜昌 443003)
摘要:半潜器是遥控猎雷系统的重要组成部分,其操控性能决定于其水动力系数。本文以加拿大遥控猎雷系统中的“海豚”半潜式航行体作为原型,对其不同潜深和附加质量之间的关系进行分析,为半潜器的控制提供参数。
关键词:半潜器;潜深;附加质量
1概述
遥控猎雷系统是反水雷系统无人化的重要组成部分,如美国的AN/WLD-1(V)1系统(如图1)和加拿大的SeaKeeper遥控猎雷系统(如图2),主要由一个柴油机推进的半潜器和水下拖曳系统组成。半潜器航行于半潜状态,通过舰上遥控设备控制航行,可根据需要航行在不同的深度。半潜器的航迹精度直接影响到探测与定位的精度,而半潜器的水动力系数又直接决定了其操控性能,因此本文以加拿大的“海豚”半潜器为原型,对潜深对其附加质量的影响进行分析。


图1 AN/WLD-1(V)1的半潜式航行器 图2 SEEKEEPER 水下拖曳系统
2 计算方法
附加质量可以通俗的理解为物体做摇荡运动所带动的一部分水运动,该部分水的质量可看作附加质量,也称为附连质量。由势流理论,附加质量是由于物体做摇荡运动产生的,这属于辐射问题,因此从辐射问题开始来讨论附加质量。辐射问题即为流场中不存在入射波,只考虑物体在静水自由面上作强迫摇荡时的流体动力影响问题。
2.1 辐射问题定解条件
取直角坐标系![]() ,
,![]() 面位于静水面,
面位于静水面,![]() 垂直向上,
垂直向上,![]() 轴指向航行体平动的方向。当物体在静水自由面附近作摇荡运动时,流场中一阶非定常速度势的定解条件为:
轴指向航行体平动的方向。当物体在静水自由面附近作摇荡运动时,流场中一阶非定常速度势的定解条件为:
| |
| |
|
其中:
|
此外还要满足一定的远方外传条件。
上面式子是在与物体一起平动的坐标系中表达的,其中![]() 为物体前进的速度,
为物体前进的速度,![]() 为物体摇荡运动的广义位移,相应的在求解上述定解问题时把速度势也进行分解,并采用格林函数法求解。
为物体摇荡运动的广义位移,相应的在求解上述定解问题时把速度势也进行分解,并采用格林函数法求解。
2.2 附加质量
物体在自由面上摇荡时受到流体的反作用力或力矩,它们在各坐标轴上的分量可由流体压力在相应的坐标轴上的投影并沿瞬时湿表面积分得到。由线性的伯努利方程可得压力为:
|
前面已经提到一阶速度势![]() 可以分解为:
可以分解为:
|
这里为物体摇荡的圆频率,下标![]() 表示摇荡运动的模态;
表示摇荡运动的模态;![]() 为第
为第![]() 各运动模态运动的幅值,
各运动模态运动的幅值,![]() 为相应第
为相应第![]() 模态的单位(规范化)速度势,可以采用格林函数求得。上式对时间求偏导,可得:
模态的单位(规范化)速度势,可以采用格林函数求得。上式对时间求偏导,可得:
|
由于物体作微幅摇荡运动,瞬时湿表面和平均湿表面差是一阶小量,这样压力在该小量的之差面上积分所得力为高阶小量,所以流体压力只须将一阶压力沿平均湿表面积分即可:
|
![]() 表示
表示![]() 方向所受的水动作用力(
方向所受的水动作用力(![]() )或力矩(
)或力矩(![]() ),
),![]() 为广义单位法线矢量的各分量。利用物面条件
为广义单位法线矢量的各分量。利用物面条件![]() ,流体作用力可以改写为:、
,流体作用力可以改写为:、
|
定义:
|
其中![]() 称为附加质量,
称为附加质量,![]() 为附加阻尼。
为附加阻尼。
3 仿真计算
3.1 仿真初始条件
潜深:2.5m,3.0m,3.5m,4.0m
航速:10kn
俯仰角:0°
横滚角:0°
3.2 仿真结果
仿真结果见图3-图8.
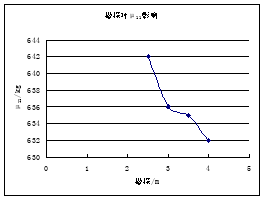

图3 潜深对μ11影响 图4 潜深对μ22影响


图5潜深对μ33影响 图6潜深对μ44影响


图7潜深对μ55影响 图8潜深对μ66影响
4 结论
由计算结果可以看出潜深对不同的附加质量影响不一,具体的说:随着潜深的增加,纵向附加质量![]() 与垂向附加质量
与垂向附加质量![]() 减小;而随着潜深的增加,横向附加质量
减小;而随着潜深的增加,横向附加质量![]() 与横摇附加转动惯量
与横摇附加转动惯量![]() 增加;潜深对纵倾转动惯量
增加;潜深对纵倾转动惯量![]() 和首摇转动惯量
和首摇转动惯量![]() 影响不大。
影响不大。
本文通过对不同潜深下的半潜器附加质量进行计算,分析潜深对半潜器附加质量的影响,可作为半潜器操控性能计算的基础。
参考文献
[1] 赵治平,艾艳辉. 国外反水雷装备及技术发展趋势 [D].中国造船工程学会水中兵器学术委员会反水雷兵器学组发展思路研讨会,2005
[2] 傅金祝.国外水雷与反水雷[M]. 宜昌:中船第七一〇研究所,2005
[3] 黄景泉,张宇文.鱼雷流体力学[M].西安:西北工业大学出版社,1989
[4] 严卫生.鱼雷航行力学[M].西安:西北工业大学出版社,2005

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号







