交通运输部北海航海保障中心天津海事测绘中心,天津, 300222
摘要 随着国家的战略发展,海洋资源越来越受到重视,不同于陆域的测量,海洋测量需要借助精密的水下测量设备才能准确的反应海底地貌,如何更加高效、准确的测量海底地貌急需被解决。目前多波束全覆盖测量是业内公认的测量效率高、精度高的测量手段。全文介绍了我们在多波束测量中遇到的常见问题及解决办法,为从事海洋测绘的技术人员提供参考。
关健词 R2sonic 2024、CARIS HIPS、声速异常、测量船实际导航位置与多波束测量参考原点偏差、水位改正、姿态改正
多波束测深系统是单波束测深系统发展过来的,与传统的单波束测量相比,多波束测深系统能在测量船航线的垂直平面内一次获取256个测深点。实现了从“点—线”测量到“线—面”测量,测量效率大大提高。目前我国海洋测量中的多波束系统多为进口国外设备,学习资料较少,发现问题不能及时解决,严重影响测量效率。下面以业内使用较多的R2Sonic 2024型多波束测深系统及CARIS HIPS多波束数据处理软件为例,遇到的有关声速改正等问题及解决办法。
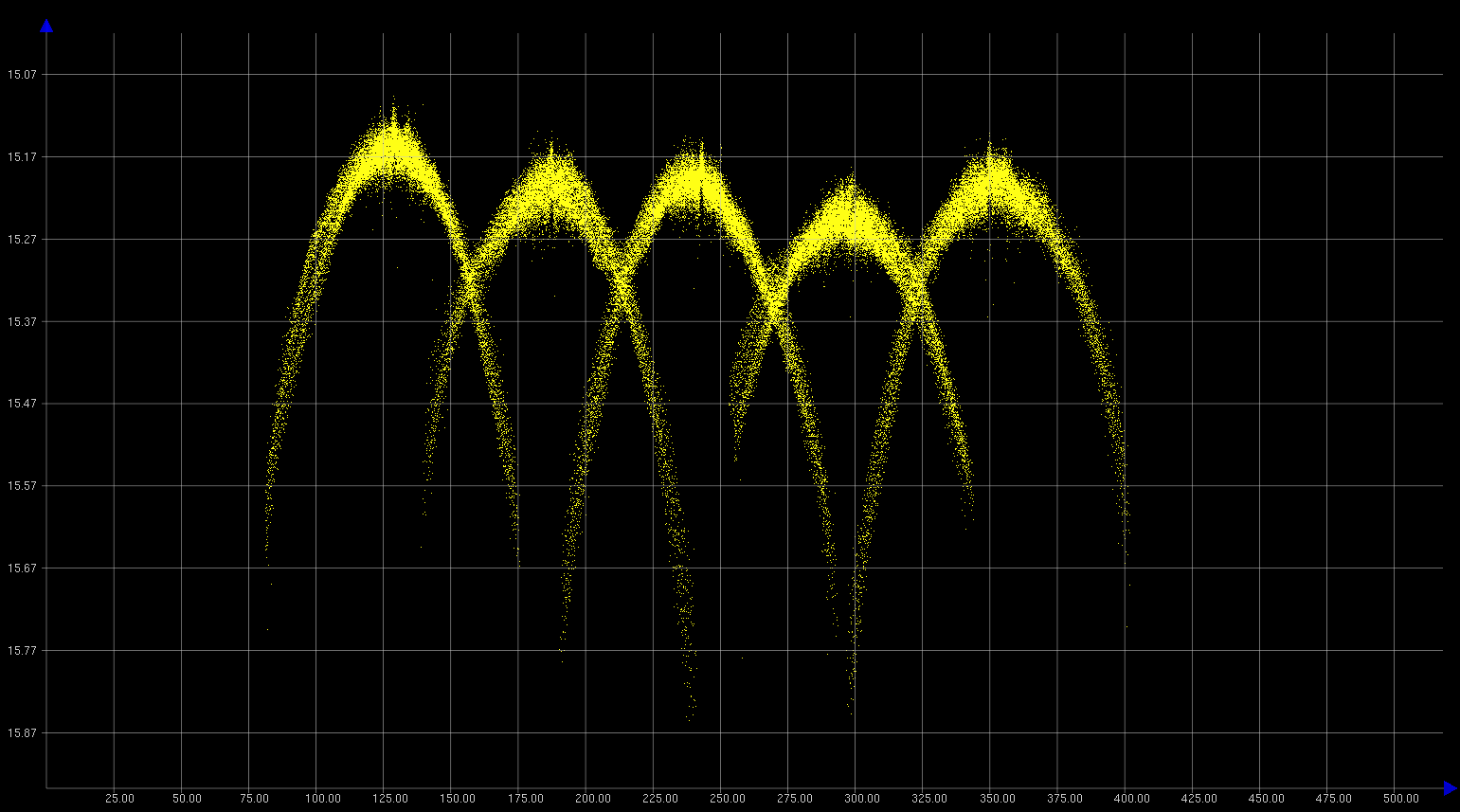
图1“哭脸”形
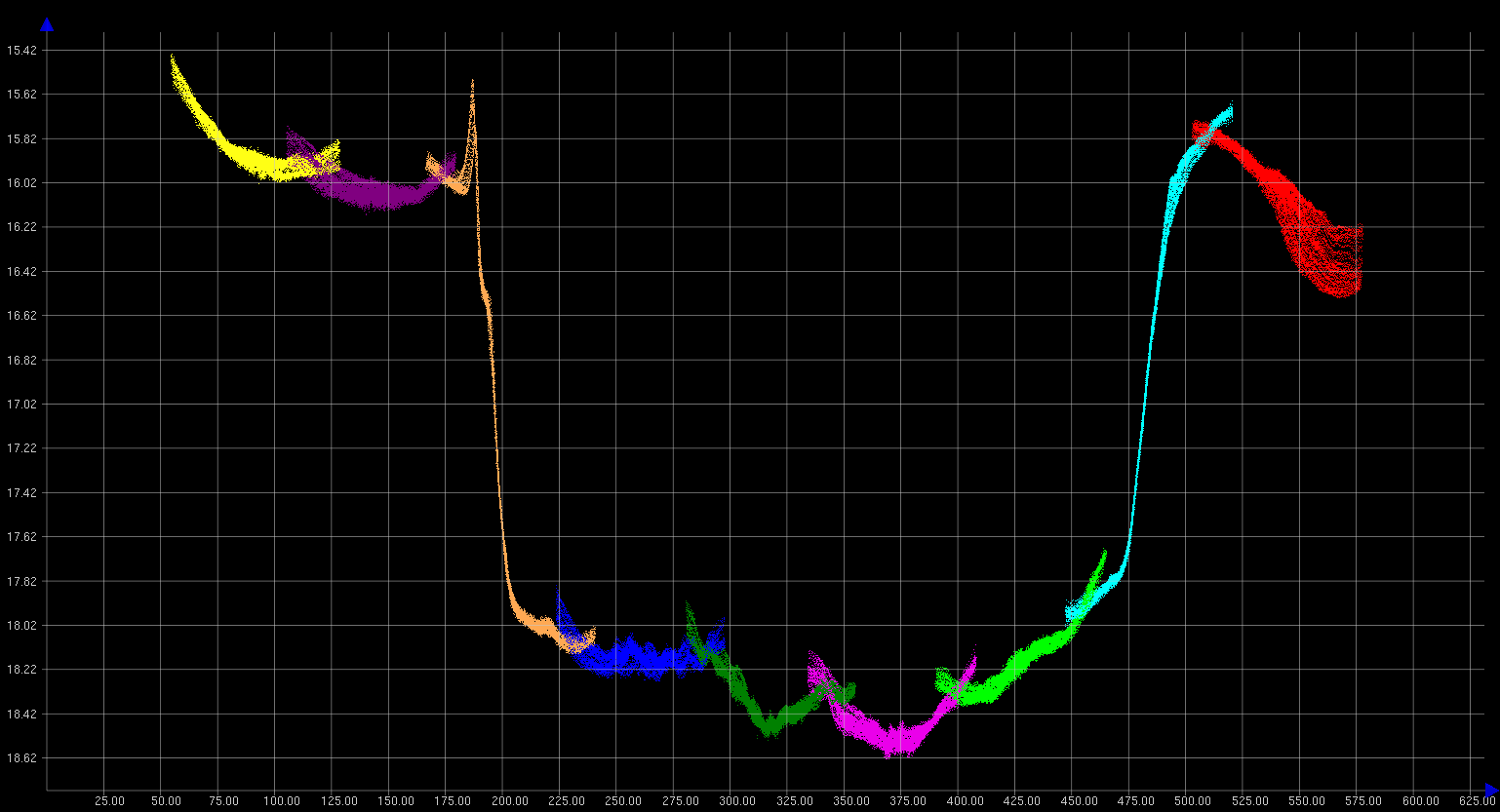
图2 “笑脸”形
遇到这种问题的解决办法其一是认为多波束换能器表面声速仪有问题,手动关闭R2sonic 2024多波束控制软件自动实时测量表面声速仪功能,测量前在测区附近范围内选择较深水域使用声速剖面仪进行声速剖面测量,在电脑导出声速数据后,直接手动将多波束换能器吃水深度的声速手动输入到R2sonic 2024控制软件中。测量中在确保效率的前提下依据时间间隔和测区距离使用声速剖面仪多次进行声速剖面测量并将每次测量得到的表面声速及时输入到R2sonic 2024多波束控制软件中,为在CARIS HIPS数据声速改正后提高数据质量,降低内业处理时间,提高效率。本文以海鹰HY1203声速剖面仪为例,在使用声速剖面仪进行声速剖面测量时需注意以下几点,(1)声速测量前须检查声速剖面仪的电量。(2)检查声速剖面仪插头的稳定性,插头是否有接触不良的情况,下水前涂抹适量防水硅脂,确保其密封性。(3)在入水前提前接入插头让声速剖面仪在空气中进行预热自检,将仪器刚刚没入海水表面海水中保持不少于1分钟,校准声速剖面仪零点漂移,以减少声速剖面仪的测量误差。(4)在收放声速剖面仪时要缓慢进行,过快容易测量声速不准确,导致声速剖面错误。其二是通过多波束CARIS HIPS软件线模式中的Refraction Editor(声速折射改正)功能进行数据调整,设置深度和声速改正值,深度选择波束水深的一半位置,从测线头到测线尾增加微调点,直至波束不再弯曲数据正常为止,如图3。调整后退出线编辑模式,进行Merge,在Merge时选择Apply refraction coefficients,确保声速折射改正被应用,图4、图5为声速折射改正后的效果。
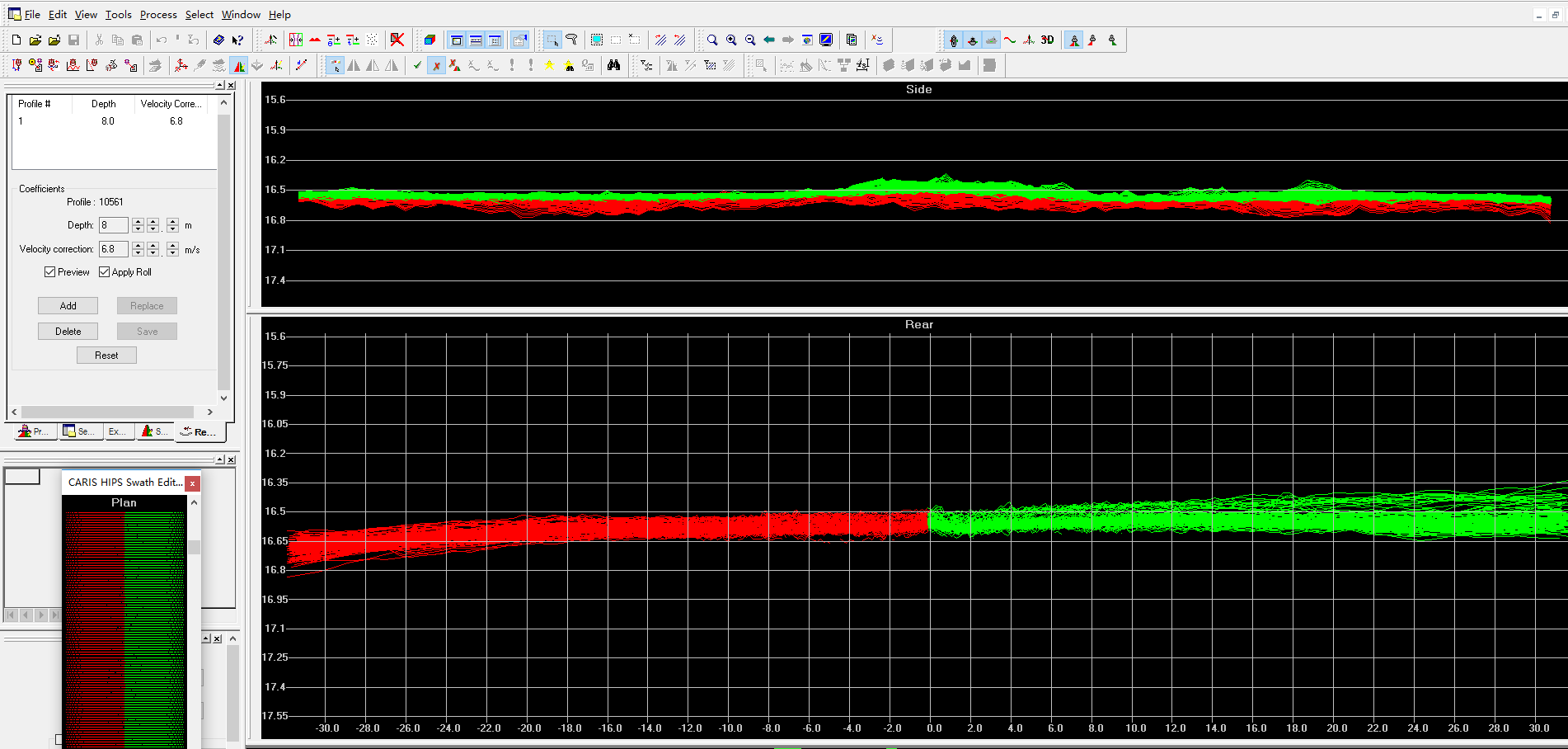
图3 Refraction Editor(声速折射改正)窗口
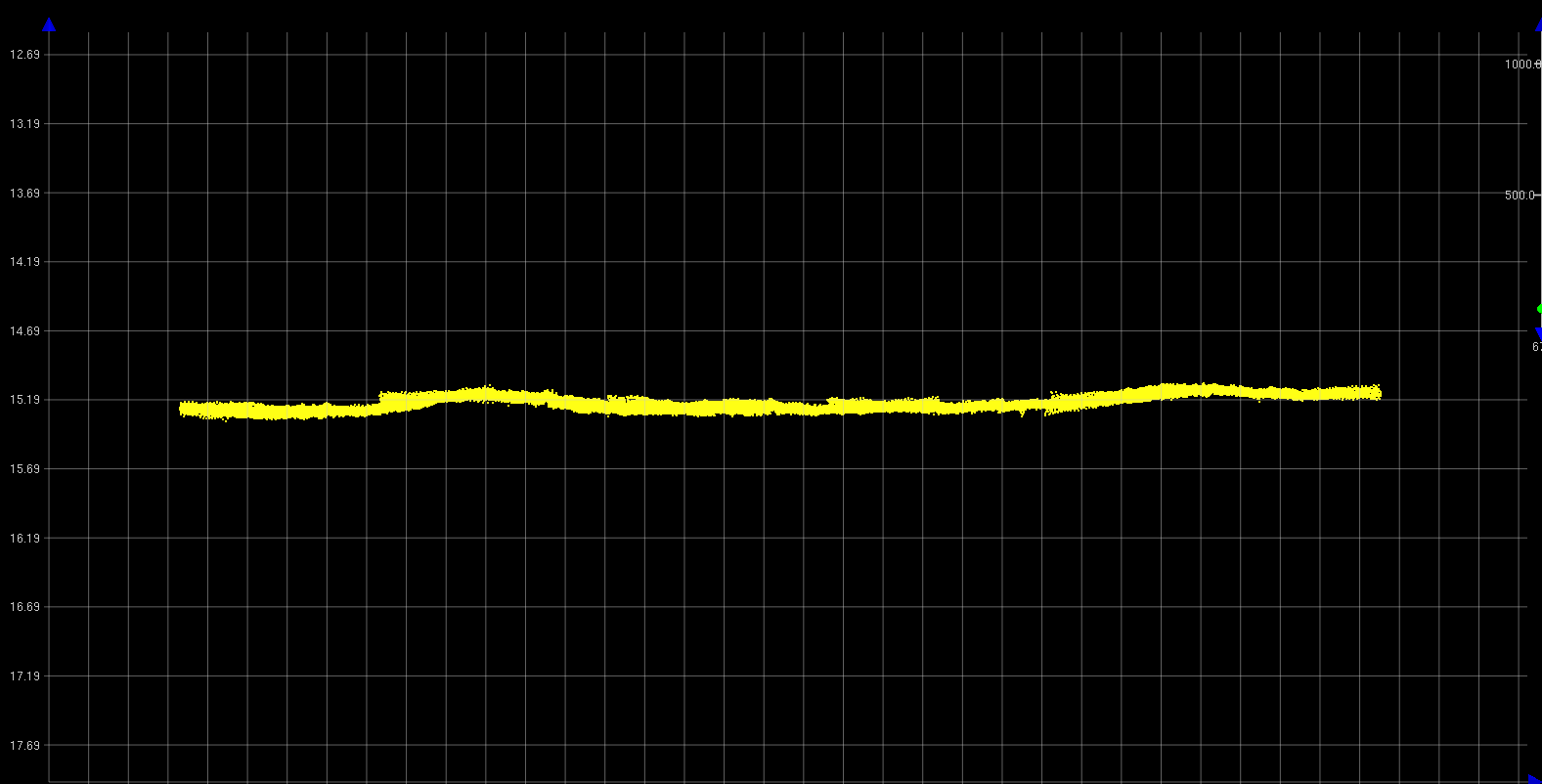
图4 “哭脸”形(声速折射改正后效果)
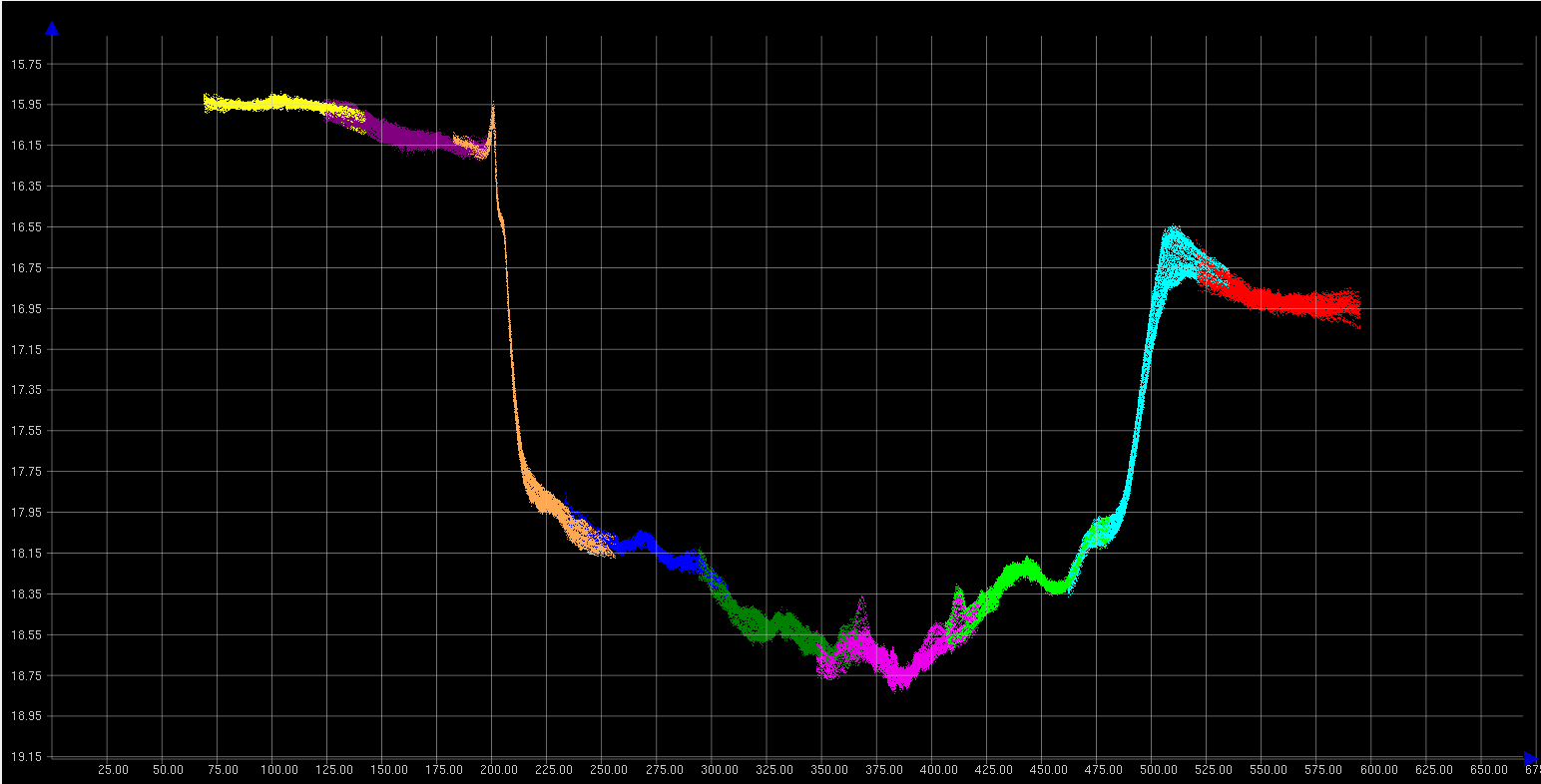
图5 “笑脸”形(声速折射改正后效果)
2、测量船实际导航位置与多波束测量参考原点偏差问题
遇到这种问题的解决办法是在测量船导航软件GPS配置选项里将GPS的位置归算到到多波束参考原点,这样实际的测量船跑线的位置就是多波束测量的位置,在多波束CARIS HIPS软件数据处理按照等间距布设的计划测线水深位置才更准确,精准度更高。本文以常用的HPACK软件中的导航功能为例,在测量准备下拉菜单中选择Hardware Setup,之后选择GPS设备设置偏移选项,输入相对于多波束参考原点的距离,这样导航位置就归算到了多波束参考原点上了,如图6。可能在小型测量船上测量时因为GPS相对于多波束测深杆参考原点的偏差不大,在实际测量中不易发现,但在大型测量船测量较浅水域时会更加突出的表现出来,所以大家要养成习惯,不仅在多波束系统中将GPS归算位置,测量船的GPS导航软件中同样需要归算位置。
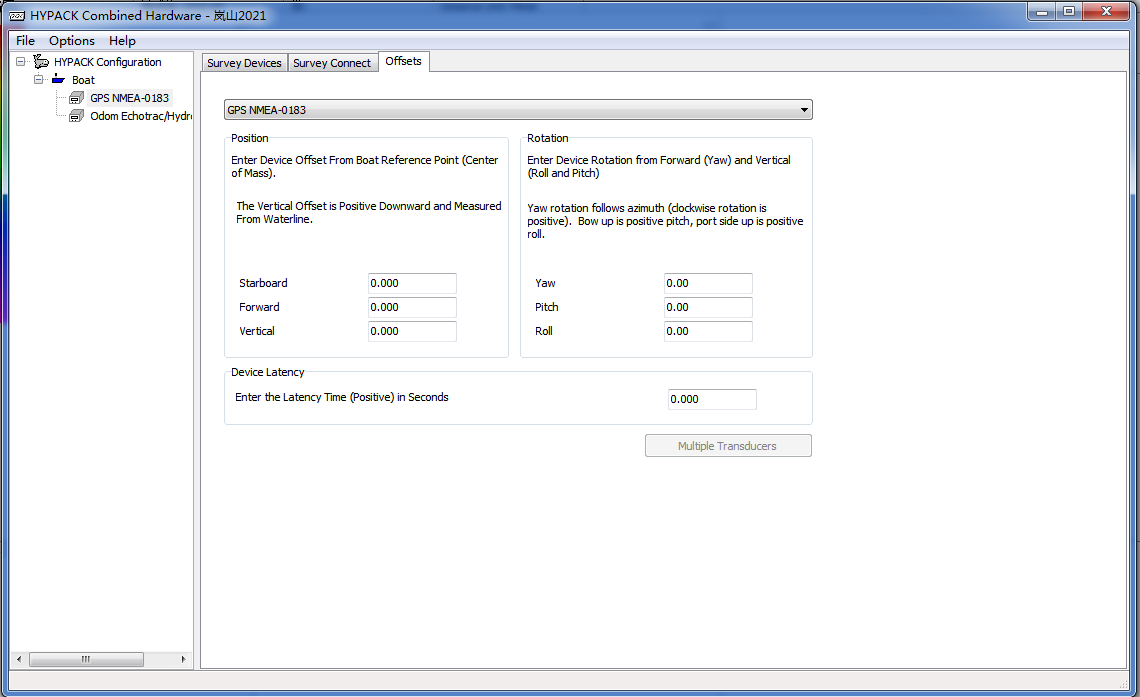
图6 HPACK软件中Hardware Setup窗口
在多波束CARIS HIPS软件水位改正Merge后,在块编辑里测线断面数据出现断层情况。发生这样的问题原因可能其一是编辑水位时数据从某点有大幅度异常变化,其二是水位编辑时水位的起止时间没有完全覆盖测量时间,导致测量数据没有全部进行水位改正从而出现断层现象。
遇到这种问题的解决办法其一是检查水位数据曲线,是否有水位数据整体跳动变化。其二是检查起止水位时间是否正确,确保水位时间全覆盖测量时间,这里注意GPS的时间如果是UTC时间,多波束系统中采用的时间是UTC时间,在编辑水位时要注意如果水位是北京时间需要减去8小时,最后编辑形成曲线平滑的水位数据,如图7。
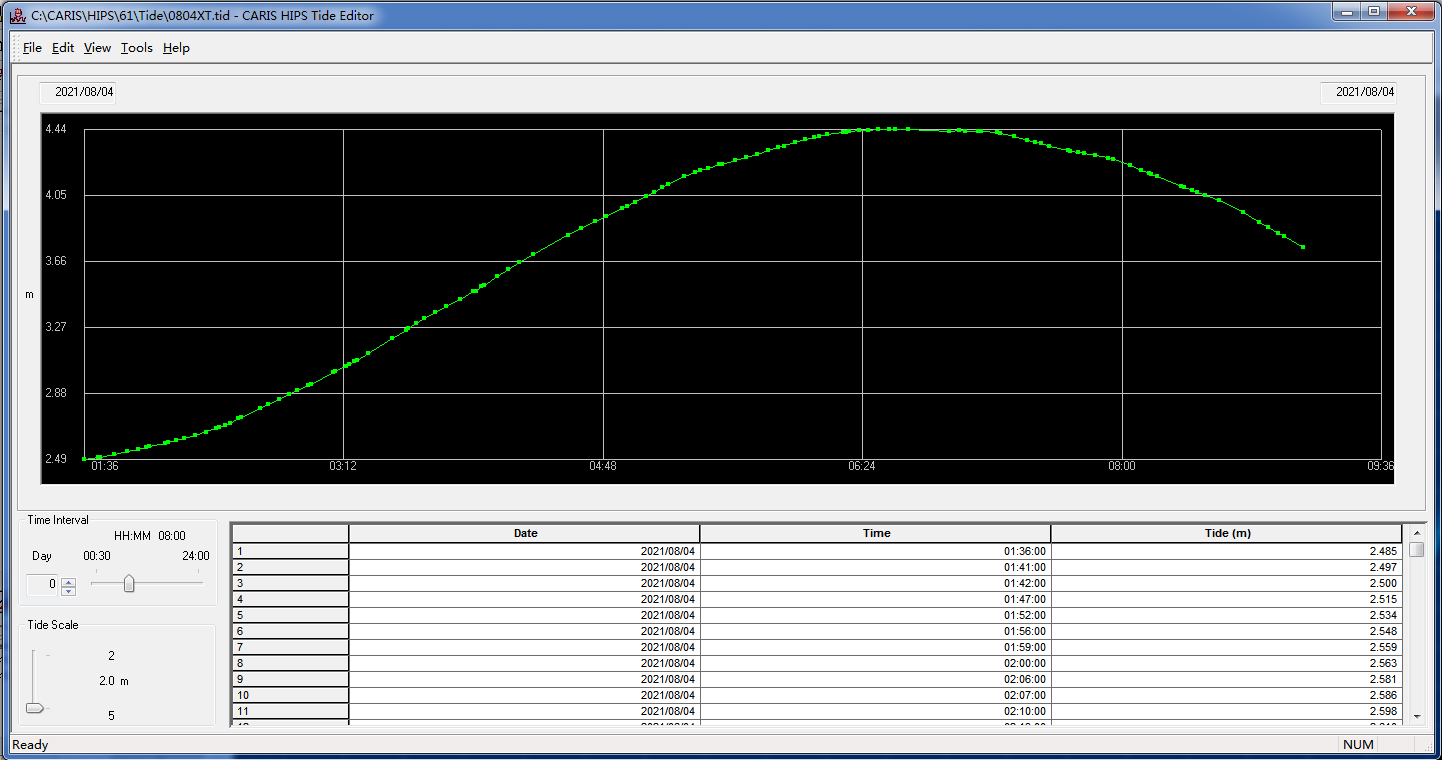
图7
4、姿态改正问题
本次以Octans光纤罗经为例,有时一天测量后在多波束CARIS HIPS软件数据处理时发现块模式下前几根测线数据姿态明显不正常,测线间无法拼接。出现这种现象的原因可能是设备刚开机直接进行测量,没有等设备预热完全稳定,导致输出的姿态数据错误。
遇到这种问题的解决办法是要注意在测量前一定要让设备提前通电进行预热20分钟以上,确保在Octans光纤罗经预热运转正常之后再进行测量,使用多波束CARIS HIPS软件处理数据时先检查姿态数据是否正常。
三 结束语
本文介绍了在多波束测量中注意的问题及解决办法,如多波束CARIS HIPS数据处理中的声速异常问题、测量船实际导航位置与多波束测量参考原点偏差问题、多波束水位改正时注意的问题、姿态改正问题,希望能够为大家在遇到相似问题时提供帮助。
参考文献
[1] 肖付民,黄毅,张永厚,等.表层声速误差对多波束测深数据的影响分析[J].海洋测绘,2021, 41(1):27-30
[2] 孟森.浅谈声速在多波束水深测量中的影响及对策[J].船舶物资与市场,2019(6):20-21
[3] 王启,刘胜旋,关永贤.浅水多波束测深资料处理关键技术探讨[J].海洋测绘,2021,41(2):29-33
基金项目:国家重点研发计划(2018YFF01013400)自组网海洋环境多参数测量仪
作者简介:李森(1990-),男,助理工程师,主要从事海洋测绘工作。
6

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



