安徽江淮汽车集团股份有限公司 安徽 合肥 230601
摘要:汽车线控转向控制技术去除了汽车中转向车轮与方向盘之间的机械连接,这一技术的推行,有效提升了汽车整体性能,确保车辆操控的稳定性和安全性,有效减轻驾驶员的驾驶负担,是目前汽车领域研究的热点。
关键词:线控技术;汽车前轮主动转向;控制策略
1汽车线控转向系统的基本组成
汽车线控转向系统的基本组成
汽车线控转向有多种实现方式,例如:前、后轮的线控转向以及四轮的线控转向。其中前轮的线控转向又被分成多种,比如,汽车运用轮毂对电机形成的牵引力会使绕主销的转向力矩得以产生,实现汽车的转向;或是利用两个相对独立的电机对汽车左右两个轮胎进行驱动,完成阿克曼转角。当前比较常用的线控转向系统,采用的是转向电机对齿轮齿条转向器驱动的方式,具体结构如图1所示。关于汽车线控转向系统,主要由控制器、前轮子系统以及转向盘子系统等几个部分组成。针对控制器,其包含如下算法:转向盘前车轮的转角算法以及正力矩的算法,分别对前轮子系统的协调处理及转向盘子系统加以控制;针对前轮子系统,其包含转向电机等系统,具有如下作用:追踪参考前轮的转角,给转向盘子系统反馈相关信息内容,如汽车行驶状况以及车胎受到外界作用力的实际情况。
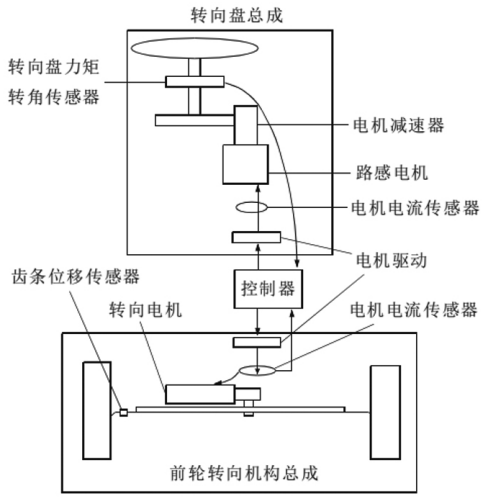
图1汽车线控转向系统基本结构
2前轮主动转向控制策略
2.1前轮转角控制策略分析
线控转向系统可以根据车速的变化获得此时的理想传动比,进而获得理想的前轮转角,该方法可以称为基于理想传动比的前馈控制。这种方法应用在汽车处于稳态工况下具有较好的控制效果。但在实际的驾驶过程中,汽车也会遇到非稳定工况,所以单单依靠基于理想传动比的前馈控制策略并不能满足汽车运行的多种工况,在此引入基于状态跟踪的反馈控制算法。
2.2前轮主动转向控制策略设计
2.2.1理想传动比下的前馈控制算法目前在较多的研究过程中是依据横摆角速度增益不变的前提下获得理想的传动比。在低速工况下采用该方法较为合理。然而当汽车高速行驶且失去稳定时很容易发生侧滑和甩尾。此时侧向加速度也应作为确定理想传动比的参考因素。理想传动比是一个变化值,其在不同的车速范围内有不同的计算方法。并且计算方法是基于汽车二自由度理想模型。具体的汽车二自由度理想模型如下图所示。根据不同的车速范围所采用的控制策略规定如下:第一,汽车在低俗行驶时侧向加速度易控制,此时侧重考虑稳态横摆角速度增益以获得理想传动比;第二,汽车在高速行驶时侧向加速度不易控制,此时侧重考虑稳态侧向加速度增益以得到理想传动比;第三,汽车在多数情况下处于中速行驶工况,此时则结合稳态横摆角速度和稳态侧向加速度增益以获得理向传动比。

图2二自由度车辆模型

上(1)式中:u为车辆沿X轴方向的速度;v为车辆沿Y轴方向的速度;ωr为横摆角速度;Mz为车辆的合力力矩;a、b为车辆的质心到前后轴的距离;δ为车辆的前轮转角;Cf、Cr为车辆的前后轮侧偏刚度;β车辆的质心侧偏角;ξ为u1与X轴的夹角;m为整车质量;Iz为车辆的横摆转动惯量;根据二自由度理想模型,可得:
ωr= …………(3)
…………(3)
由式(2)可得:
 …………(4)
…………(4)
当汽车处于稳态行驶时,其侧向加速度可略等于:
ay=uwr
由式(3)、(4)可得基于车轮转角的侧向加速度增益表达公式为:
 =u×
=u× )s…………(5)
)s…………(5)
所以当汽车属于稳态工况时,可得横摆角速度和侧向加速度的增益值表达式为:
 …………(6)
…………(6)
通常情况下,汽车转向系统的传动比定义为:
 =
=
将式(6)带入式(5)中可得:
结合两个参数稳态增益的角传动比,可以得到理想的角传动比表达式为:
i=Kxiwr+Kyiay
式中,Kx、Ky为比例系数,其值可以根据驾驶工况或者驾驶员的习惯来选定。在此,选定Kx=0.6,Ky=0.4。本次研究中选定iωr为0.22s-1,iay为4.12s-2。计算得到K=0.0022s2⁄m2。
角传动比应设置最小限定值和最大限定值。最小限定值是为了消除汽车在较低车速行驶时车轮对于方向盘转动较于敏感的问题;而最大限定值则是为了避免汽车在较高速行驶时反应迟速的现象。经查阅文献,选定角传动比最小限定值为8,最大限定值为20。
3结束语
应用汽车线控转向技术,有效提升了汽车驾驶的稳定性、安全性,让行车更为舒适,是未来汽车行业发展的重要方向。在技术的进步下,汽车电子元件成本也会慢慢下降,随着控制算法的成熟以及42V电源技术的广泛推行,未来汽车线控转向技术的应用将会日益普及,逐步取代以往的机械传动结构,通过集成化的方式来控制汽车行驶,有效提升汽车的整体性能,这是未来汽车领域发展的主导方向,对于顺利推进无人驾驶的实现具有深远意义。
参考文献
朱华.汽车线控转向系统[J].汽车电子,2011,(08):80-82.
于蕾艳,林逸,施国标.线控转向系统控制策略的研究[J].计算机仿真,2008年6月,P248-251.
于蕾艳,林逸,施国标.遗传算法优化线控转向系统角传动比的研究[J].计算机仿真,2008,25(8):268-270.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



