国网浙江省电力有限公司建设分公司 杭州 310016
摘 要:
针对电力输变电工程GIS安装过程中的管道对接场景,本课题设计并生产一种基于多维视觉定位技术的GIS安装系统,应用于实际。智能安装系统依托多维视觉定位系统,通过六自由度并联多轴运动控制系统,实现精密GIS腔体安装过程中的精密对接。
关键词:多维视觉定位,GIS
0 引言
在变电站安装工程中,GIS筒体安装一直是困扰基建施工的难题。GIS形状各异,安装精度要求高,整体施工环节较多、工艺复杂,目前均采用吊机及人工配合的方式进行安装。吊机体积较大,在移动和摆动过程中上下左右前后幅度不易精确控制,安装过程易磕碰导致局部设备损坏。
随着各个建设行业工程的大规模建设,智能机械臂已成为大工程、精密对接技术、有限空间作业环境下施工难题的重要选择。目前,机械臂的应用开发多集中在工厂智能化生产领域,在电力建设施工方面,现在仍以传统的工器具,比如,可升降人字梯、手叉车、吊车等吊装器具。
本文考虑在机械臂的前端搭配一组并联六自由度液压平台,灵活实现三维空间的六个独立运动及其组合运动,依托多维视觉定位系统,通过六自由度并联多轴运动控制系统,实现精密GIS腔体安装过程中的精密对接,解决有限空间施工条件下的作业难题。
1 基于多维视觉定位技术的GIS安装智能系统方案设计
本文所设计方案主要用于GIS腔体对接、安装,采用模块化设计,能够根据不同的结构拆分组合,具有良好的适用性。方案主要由机械系统、电气系统、控制系统与多维视觉定位系统组成,多维视觉定位系统为核心组件。
2 基于多维视觉定位技术的控制系统设计
控制系统用于控制整个结构,通过定位系统和执行机构的有效结合,通过软硬件配合协同工作,实现实际安装运动逻辑程序化,满足现场安装实际需求,一键式自动对接。
(1)接收识别定位系统数据,在相对位移满足六自由运动平台活动空间后,提示操作者可进行精密对接操作;(2)采用有线和无线遥控方式,进行对接系统和夹持机构的控制,采用手轮或摇杆进行遥控六自由度运动平台的手动操作,操作简便易学;(3)具有故障告警、紧急停止、一键自动对接等功能。控制系统主要由手轮、视觉定位系统和EPEC 控制器组成。对接过程由手动对接模式和自动对接模式组合。
2.1 多维视觉定位技术
多维视觉检测功能及对接力觉感知能力。针对GIS精密对接需要机械臂自动化水平进一步提高,需要装配系统具有很高的定位精度,具备多维视觉检测功能及对接力觉感知能力,即需要多种类型的传感器,例如无线相机、红外测距等传感器,复杂环境中对多方位距离的控制要精确和规避,这就需要软硬件配合协同工作,使机械臂具备简单的人工智能,会判断特定场景下的动作。

图1 3D摄像机安装示意图
视觉定位系统包括一台3D 摄像机、主控计算机、通信线缆和电源,如图1所示。将3D 相机固定在夹取管道的一个螺栓孔上,通过工装安装,可得知相机相对于夹取管道轴线的位置距离,然后通过采集固定管道的视觉信息,通过神经网络模型训练对螺栓孔的检测,提取目标特征小孔,如图2所示,然后计算得到目标对接管道法兰面与相机的景深来求取目标管道相对于对接管道的偏转角和平移距离。
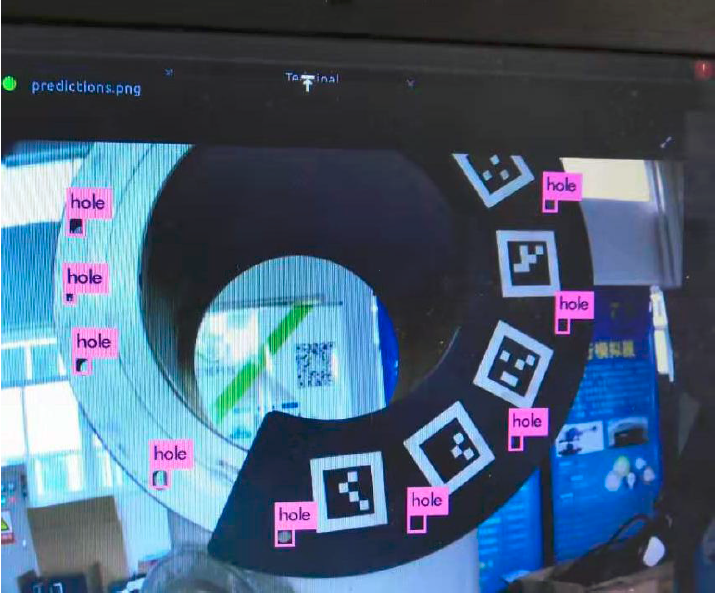
图2 GIS腔体螺栓孔识别
识别法兰孔姿态旋转的翻滚角、俯仰角和回转角:
(1)通过对管道B截面水平方向上两个点相对于摄像头的距离的测量,从而获得一个三角形,对该三角形求解,从而获取管道的翻滚角。
(2)同理,通过对管道B 截面垂直方向上两个点相对于摄像头的距离的测量,从而获得一个三角形,对该三角形求解,从而获得管道的俯仰角。通过深度相机对候选的待对齐的标志定位孔的在摄像头视场中偏离中心位置的弧线距离,计算出管道在Z 轴方向的旋转的角度。
识别管道平移的距离:如图3所示,由于摄像机的安装是通过工装确定、因此摄像机相对于管道A的中心位置已确定。摄像头中B管道的位置的中心点可以被识别,通过测量B管道中心点在摄像头视场中的偏移,从而获得B管道与A管道三个轴线上的相对位移。
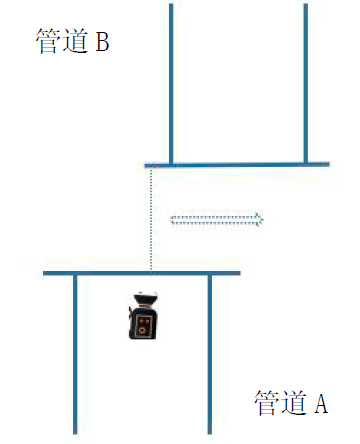
图3 平移距离检测原理示意图
2.2 对接系统
对接流程如下:(1)摆动吊机大臂,由夹取机构夹取管道,并通过手轮发送信号给EPEC 控制器控制回转机构转动和夹取油缸做伸缩动作,调整夹取机构快速夹取管道,然后将摄像机安装固定在夹取管道前端法兰孔上;(2)摆动吊机大臂,将对接管道旋转到与目标对接管道相距300mm 位置,如图4所示;
图4 管道坐标系建立
(3)通过倾角传感器反馈前端夹取机构与水平地面的倾角,通过EPEC 控制系统控制平衡调平对接机构,使其受垂直向下的力并保持静止;(4)切换对接模式为手动对接,通过手轮调整两根管道的轴线大致重合(两个对接法兰外圆相差不超过±20mm);
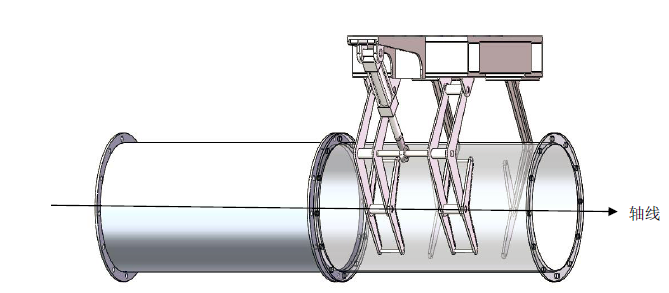
图5 对接完成状态图
(5)切换对接模式为自动对接模式,由视觉定位系统负责获取解算目标管道与对接管道的空间姿态和位置(包括三个轴向上的转动和平移),将目标值发送给对接系统EPEC 控制器,拆掉摄像机。控制器解算得到油缸的目标位移值,控制油缸运动将对接管道对接到与目标管道相距20mm 位置,然后由施工人员拧上螺栓;
(6)最后切换到手动对接模式,控制轴线方向缓慢向前运动,同时拧紧螺栓,将四个对角螺栓拧紧后松开夹紧机构,进行下一次对接任务。
2.3 控制系统
选用EHA动作器,由直流无刷电机驱动,控制器实时控制,能完成绕X、Y、Z三轴的旋转与沿三轴的平移运动,能够满足GIS安装时的校准移动需求。
通过倾角传感器监测反馈对接机构前端的倾斜角,由控制系统控制平衡油缸调整对接机构垂直向下。由手轮和视觉发送控制指令给EPEC控制系统,再由EPEC控制系统控制各个机构动作。通过手轮调整回转机构、夹紧机构和换对接模式(自动对接和手动对接)。手动对接模式由手轮控制对接机构单轴运动。
自动对接模式由多维视觉定位系统采集目标管道与对接管道的相对空间位姿,反馈给控制系统,通过控制系统解算,然后控制对接系统完成姿态变换,实现对接管道与目标管道对接功能。
3 结论
本文开展了基于多维视觉定位技术的GIS安装智能定位研究,该研究具有精度高、响应快的特点,通过视觉定位系统可以灵活实现三维空间的六个独立运动及其组合运动,实现了精密GIS腔体安装过程中的精密对接。破解了有限空间施工条件下的作业难题,能够有效缩短电气安装的工期,减少人力物力财力投入,带来巨大的社会经济效益。
参考文献:
1. 《六自由度并联平台多轴运动控制系统设计》,机床与液压,2020 年3 月第48 卷第5 期
2. 《基于电磁吸附的输电线路角钢塔攀爬机器人结构设计》,机床与液压,2020 年3 月第48 卷第5 期
3. 《高压开关柜局部放电检测机器人的开发与应用》,中国电力,2019 年 3 月
本文受国网浙江省电力有限公司《智能机械臂在变电工程中的研究和应用》(5211JJ18000K)资助。
作者:张弓(1970年-),男,高工,主要研究方向为电气工程及其自动化

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



