青岛瑞普电气股份有限公司 山东省青岛市 266111
摘要:线性FMCW雷达具有低发射功率、无距离盲区以及高分辨率等应用优势,近年来备受人们关注。本文介绍了FMCW雷达的结构、原理,分别以VTS导航与商船导航为视角探究了FMCW雷达的有效应用,主要分析了其应用策略,希望更多的人认识线性FMCW雷达,看到FMCW雷达的应用价值,同时促进FMCW雷达的普及应用,为民用雷达发展提供研究路径。
关键词:线性FMCW雷达;VTS导航;商船导航;应用研究
引言:导航雷达最初应用在军事活动中,随着经济、科技等的发展,其渐渐步入了民用领域。但是,其用于民用领域的性能长期走低,测距和测速长期难以兼容,不过FMCW导航的应用为解决测距、测速兼容的问题带来了方向,研究表示FMCW导航确有效果,因此,深入研究FMCW雷达的应用具有现实意义。
1线性FMCW雷达
线性FMCW雷达由上位机显示屏、主板控制界面、信号处理机、收发支路与天线5个部分组成。其中,上位机显示屏和主板控制界面负责显示FMCW雷达采集到的目标信息(包括距离、角度等),如若有伺服系统可发挥控制FMCW雷达工作模式的作用[1]。信号处理机由FPGA与DSP构成,可全权控制FMCW雷达工作模式、工作状态,发挥信息处理、存储、对外高速接口等作用。收发支路由滤波器、放大器、晶振等构成,负责形成信号、采集信号、放大等。天线由接收天线与发放天线构成,负责接收与发射信号。具体如图1所示。
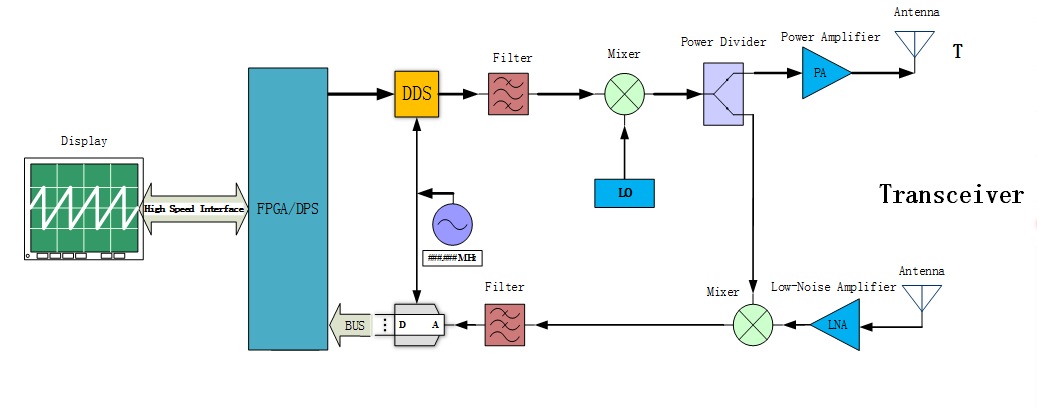
图 1 线性FMCW雷达结构图
2线性FMCW雷达原理
FMCW雷达包含锯齿波调制与三角波调制两种。以三角波调制为例,阐述FMCW雷达侧距离与测速度的原理。如图2所示,黄色表示接受信号的频率,蓝色表示发射信号的频率,T表示扫频周期,B表示扫频带宽,发射信号穿越目标发射,接收信号会出现延迟,根据三角波波动,可在上升沿以及下降沿中测距。
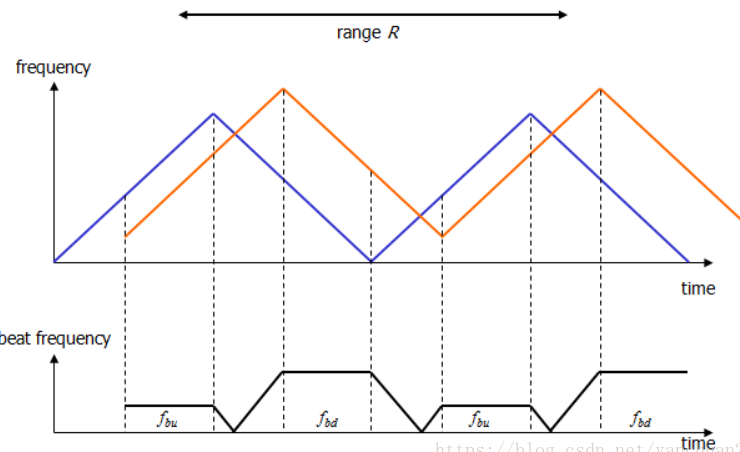
图 2 三角波调制示意图
若FMCW雷达和目标之间缺少相对运动(缺少多普勒频率)耦合于差拍信号上的情况下 ,但若目标运动,此时差拍信号上会出现
,但若目标运动,此时差拍信号上会出现 ,因此
,因此 ,此时可得
,此时可得 与
与 。那么,根据图2差拍频率可作此表示,即
。那么,根据图2差拍频率可作此表示,即 ,速度可作该表示,即
,速度可作该表示,即 。再结合距离公式和速度公式
。再结合距离公式和速度公式 和
和 得到距离与速度。其中
得到距离与速度。其中 已知,
已知, 、 经测量可得。
、 经测量可得。
3线性FMCW雷达在VTS雷达中的应用
上世纪90年代中期VTS雷达中开始应用FMCW雷达,于VTS而言,FMCW雷达有下述两大应用优势。
第一,VTS雷达想要具备导航功能,必须拥有高水平距离分辨能力、方位分辨能力,同时可以精准测量距离、方位。传统脉冲雷达因为发射脉冲宽度的制约其距离分辨能力有限,如果使用隙缝型天线则容易出现瞬变效应,这会影响其方位分辨能力,因此,兼顾距离、方位分辨十分困难。
FMCW雷达与上述雷达、天线进行比较可以轻易拥有高水平距离分辨能力。根据 ,当B=50MHz时,距离分辨能力
,当B=50MHz时,距离分辨能力 =3m十分容易。虽如此,这也是雷达史的一大进步。
=3m十分容易。虽如此,这也是雷达史的一大进步。
第二,VTS雷达控制范围内,有可能存在多台距离约10~20km的港口雷达,而它们相互间容易发生干扰,且容易遭受VTS雷达水域中船舶导航雷达的影响。若把VTS雷达换成FMCW雷达,干扰会大大降低。
综上,相较于脉冲雷达,FMCW雷达具有高应用优势,其在VTS雷达中的应用前景极为广泛。
例如,VTS雷达需要 ,T=1ms,
,T=1ms, ,B=50MHz,根据公式
,B=50MHz,根据公式 以及
以及 可以计算出
可以计算出 =10MHz。简单地说,为了实现测量最远处目标距离,最低频率应为 ,N= T=
=10MHz。简单地说,为了实现测量最远处目标距离,最低频率应为 ,N= T= =10000。为了实现该目标,选择并行处理方法,如图3所示。现阶段,高速DSP芯片在1ms内能够实现1024点FFT,因此,设计时每个DSP单元均依据1024点FFT设计,如果距离分辨能力等于3m,则设计1片DSP最大距离分辨能力等于1.5km.想要获知30km范围内的目标则通过DSP并行处理实现[2]。即通过把全程分为若干部分,计算出每个部分中的目标数量,以此实现高精度全程计算。
=10000。为了实现该目标,选择并行处理方法,如图3所示。现阶段,高速DSP芯片在1ms内能够实现1024点FFT,因此,设计时每个DSP单元均依据1024点FFT设计,如果距离分辨能力等于3m,则设计1片DSP最大距离分辨能力等于1.5km.想要获知30km范围内的目标则通过DSP并行处理实现[2]。即通过把全程分为若干部分,计算出每个部分中的目标数量,以此实现高精度全程计算。
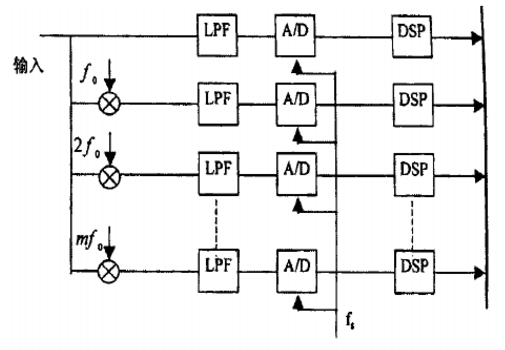
图 3 FMCW雷达并行处理示意图
4线性FMCW雷达在商船导航中的应用
港口建设、VTS建设需要消耗大量资金,但是港口雷达数量较少,故而也能够承担得起大投资。但是商船中船舶类型众多,包含大型、中型、小型,投资者因为运营、运输等考量希望雷达兼有性能佳、成本低的特点。故而绝不可能如VTS雷达一般为了实现全程远距离高分辨能力而应用20片高速DSP。
因此,为了满足商船导航的应用需求,FMCW雷达应用于商船导航的设计只存在1片高速DSP。具体而言,随着航程的提高,扫频频宽会成倍降低,与其相应的是距离分辨能力、方位分辨能力也会降低,但扫频时间会提高,促使采样点数维持不变,仍为1024,如图4所示。
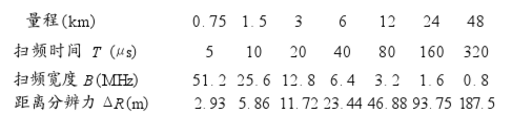
图 4 FMCW雷达商船导航应用设计方案示意图
通过上述方案基本上能够满足商船应用需要。详细来看,将FMCW雷达应用在商船导航中具有下述五点优势。第一,能够拥有特别高的集成度,也包含微波集成组件,同时满足全固态低压兼低功耗,进而可以大大提升可靠度。第二,具有抗被侦察性,可以防御外部环境的低频电磁波干扰。第三,具有极高的距离分辨能力,且能够与高水平方位分辨能力共同存在。第四,长时间状态下具有带宽积高敏感性。第五,高抵抗能力可以抵御源干扰。这些优势恰好是商船导航雷达所需要的功能,故而,在导航技术日益完善以及相关元器件成本渐渐降低的当代,可以推断的是,既重视性能又重视效益的商船导航雷达在不远的未来将会广泛使用FMCW雷达。
结论:总而言之,雷达应用至今已有70年之久,现如今雷达不仅在军、民领域均得到了广泛应用。FMCW雷达也得到了发展与完善,其在测距、测速等方面应用价值极高,许多国家对线性FMCW雷达进行了深入研究,FMCW雷达也已经具备了一套技术体系,将其用于VTS导航与商船导航中可以解决两者的固有问题,促进两者发展。因此,建议相关人士应用线性FMCW雷达,发挥其优势,服务于自身。
参考文献:
[1]吴金君.FMCW雷达对手势目标的检测和分类算法研究[D].重庆邮电大学,2019.
[2]曾维棋.基于FMCW雷达的高精度测距定位算法研究与实现[D].电子科技大学,2019.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号