中国船舶集团有限公司第七一○研究所,湖北,宜昌, 443003
摘要:目前对于锚定浮标在风浪等外力作用下产生摇荡运动以及砰击、上浪等现象的数值仿真普遍采用自由液面跟踪法,但并不能很好的处理破碎波及复杂的自由液面,无法对锚泊浮体的水动力特性做出准确预报。针对自由液面跟踪无法准确预测锚泊系统运动特性的问题,文章采用商业CFD计算软件STAR-CCM+对锚泊浮体在三、四、五级海况下的运动特性进行计算,得出锚定浮标在不同海况下的运动特性,获取浮标姿态、锚链张力等信息,为浮标优化设计提供依据 。
关键词:海况;锚泊浮标;运动特性; STAR-CCM+
中图分类号: 文献表示码:A 文章编号:
Analysis of Motion Characteristics of Moored Floating-body Under Different Sea Conditions
Liu Shufeng
(Yichang Research Institute of Testing Techology,Yichang , 443003,Hubei)
Abstract: As to the fact that free surface fitting method cannot precisely predict the characteristics of motion of Moored Floating-body, STAR-CCM+ software is used to simulate and analyze wave-induced motion of moored floating-body under level 3~5 sea conditions. The results indicates that the method can efficiently predict the characteristics of motion of Moored Floating-body.
Keywords: sea conditions;moored floating-body;motion characteristics;STAR-CCM+
引言
船舶和海洋平台在波浪中运动和载荷的数值分析,具有重要的理论意义和工程价值。目前对于锚泊浮标的计算,大多采用悬链线方法,该方法是一种简单的解析方法,但是由于其采用了过多的假设,造成了计算结果精度偏低。为了锚泊系统的安全,锚泊系统设计者不得不在计算结果上乘以一个比较大的权数,以保证实际锚泊系统达到设计要求。
随着计算性能的快速提高和计算数学理论的不断发展完善,数值方法已经成为研究问题和解决问题的重要手段之一,它不仅在理论研究领域得到普遍应用,而且在工程实际中也被广泛使用。本文采用数值仿真的方法,在确定的锚泊条件下,模拟了三、四、五级海况下浮体的运动特性。
1 计算模型
计算采用STAR-CCM+软件,它提供一套可以解决各种各样的建模需求、集成组件相结合的功能强大的组件包,可以通过协同工作导入表面、定义边界条件、设置网格模型及参数、生成网格、设置物理模型与参数、定义求解参数、准备后处理一直到运行分析的整个模拟过程。
采用结构网格重叠网格技术求解在等温条件下求解不可压缩粘性雷诺平均N-S方程来模拟多相流复杂流场结构[3];质量和动量方程守恒如下:
![]() (1)
(1)
 (2)
(2)
其中,![]() 是控制体,
是控制体,![]() 是围成控制体的面积,
是围成控制体的面积, ![]() 是
是![]() 上
上![]() 方向的速度,
方向的速度,![]() 和
和![]() 分别是速度和压力。
分别是速度和压力。
湍流模型采用![]()
![]() 湍流湍流模型[4-7]。其湍动能
湍流湍流模型[4-7]。其湍动能![]() 和湍流耗散频率
和湍流耗散频率![]() 运输方程如下:
运输方程如下:
![]() (3)
(3)
 (4)
(4)
式中,
![]() ,
,![]()
![]() 表示由于平均速度梯度引起的湍动能产生;
表示由于平均速度梯度引起的湍动能产生;![]() 表示由于浮力影响引起的湍动能产生;
表示由于浮力影响引起的湍动能产生;![]() 表示可压缩湍流脉动膨胀对总的耗散率的影响;
表示可压缩湍流脉动膨胀对总的耗散率的影响;![]() 和
和![]() 是常数;
是常数;![]() 和
和![]() 分别是湍动能及其耗散率的湍流普朗特数。
分别是湍动能及其耗散率的湍流普朗特数。
自由液面的处理采用VOF方法,其基本原理是利用计算网格单元中流体体积量的变化和网格单元本身体积的比值函数![]() 来确定自由面的位置和形状。VOF方法根据各时刻流体在网格单元中所占体积函数,来构造和追踪自由面。对于包含液体和空气2种流体的空间区域,定义标量函数
来确定自由面的位置和形状。VOF方法根据各时刻流体在网格单元中所占体积函数,来构造和追踪自由面。对于包含液体和空气2种流体的空间区域,定义标量函数![]() ,存在液体空间点的
,存在液体空间点的![]() ,反之为0。VOF方法将流体体积函数
,反之为0。VOF方法将流体体积函数![]() 设定在单元中心,流体速度设置网格单元的中心,根据相邻网格的流体体积函数
设定在单元中心,流体速度设置网格单元的中心,根据相邻网格的流体体积函数![]() 和网格单元四边上的流体速度来计算流过制定单元网格的流体体积,借此来确定制定单元内下一时刻的流体体积函数,并根据相邻网格单元的流体体积函数 来确定自由面单元内自由面的位置和形状。
和网格单元四边上的流体速度来计算流过制定单元网格的流体体积,借此来确定制定单元内下一时刻的流体体积函数,并根据相邻网格单元的流体体积函数 来确定自由面单元内自由面的位置和形状。
![]() 函数满足的方程为:
函数满足的方程为:
![]() (5)
(5)
对于波浪模拟,采用STAR-CCM+软件的Pierson-Moskowitz海浪谱模型,可以用来模拟海面波浪对锚定浮标的运动特性影响规律。
2边界条件设置及网格划分
2.1 边界设置
根据模型及相应的流动条件,确定相应计算域:80X40X20m;
在整个数值模拟过程中,需要指定波浪生成条件、计算域外边界条件以及物面条件,具体边界条件设置如下:
流域的顶部边界面设为Pressure Outlet,底部边界面和四周边界面均设为Velocity Inlet,浮标的表面设置为壁函数求解。根据GJB4000-2000。各级海况对应的海浪参数为:三级海况有义波高H=1.25m,平均周期T=7.5s;四级海况有义波高H=2.5m,平均周期T=8.8s;五级海况有义波高H=4m,平均周期T=9.7s。

图1 模型示意图
2.2 网格划分
计算网格的质量直接影响数值计算的可行性、收敛性及计算精度。计算区域内部采用切割体网格、棱柱层网格以及表面重构的方法进行网格的生成。对于浮标的表面采用棱柱层网格进行划分,这样保证表面适当的边界层生成,棱柱层的外部的计算区域则采用切割体网格进行生成。为了节约计算资源以及提高浮标周围流场的流体特征分辨率,一方面选择从外到内进行逐步体积细化的方式,远离浮标网格越稀疏,越靠近浮标网格越密;另一方面对水线附近的区域进行网格细化。这样在保证网格精度的条件下大幅度大幅减小了网格数量,网格节点总数为120万,计算网格划分示意图如下图所示。网格单元基本按照笛卡尔坐标方向排列,在计算域中的绝大部分区域网格单元都接近于长方体,且正交性高于80°的网格单元可以占其总数的80%以上[8]。
| |
a整个计算域网格图示 | b弹体表面网格图示 |
图2 模型网格图示
3 数值计算结果及分析
图3分别给定三、四、五级海况初始波浪初场,浮体底部设有锚泊,锚链为碳素钢材料,海水深度为40m,锚泊链无初始预应力,锚泊链刚度1000000M/m,锚链1、2长度均为5m,锚链3长55m,锚泊在模型底部。
图3 锚泊示意图
3.1浮体运动特征
计算约15个入射波周期。图4-6给出了三、四、五级海况下浮标的垂直位移变化,图7-9给出了三、四、五级海况下浮标的俯仰角变化。可以看出,浮标的姿态(垂直位移、俯仰角度)出现周期性规律变化,且垂直位移和俯仰角度的变化幅值随遭遇海况的等级增大而增大,浮标在-3.23m~3.92m深度来回振荡,在15.19°~47.77°角度来回转动。
图4三级海况下浮标垂直位移变化曲线

图5四级海况下浮标垂直位移变化曲线
图6 五级海况下浮标垂直位移变化曲线

图7三级海况下俯仰角变化曲线
图8四级海况下俯仰角变化曲线
图9五级海况下俯仰角变化曲线
3.2 锚泊张力变化
图10~12给出了三、四、五级海况下,模型锚泊链1、2、3的张力随时间的变化曲线。可以看出,在海浪作用下浮标沿浪向发生俯仰运动,导致锚链2的张力大于锚链1的张力;在五级海况作用下,浮标姿态发生较大变化,导致锚链出现拉直状态,锚链的张力瞬间增大,锚链1最大张力达到7521N,锚链2最大张力达到5363N,锚链3最大张力达到11870N。

a)锚链1张力
b)锚链2张力

c)锚链3张力
图10三级海况下锚泊张力随时间的变化曲线
a)锚链1张力

b)锚链2张力
c)锚链3张力
图11四级海况下锚泊张力随时间的变化曲线
a)锚链1张力

b)锚链2张力

c)锚链3张力
图12五级海况下锚泊张力随时间的变化曲线
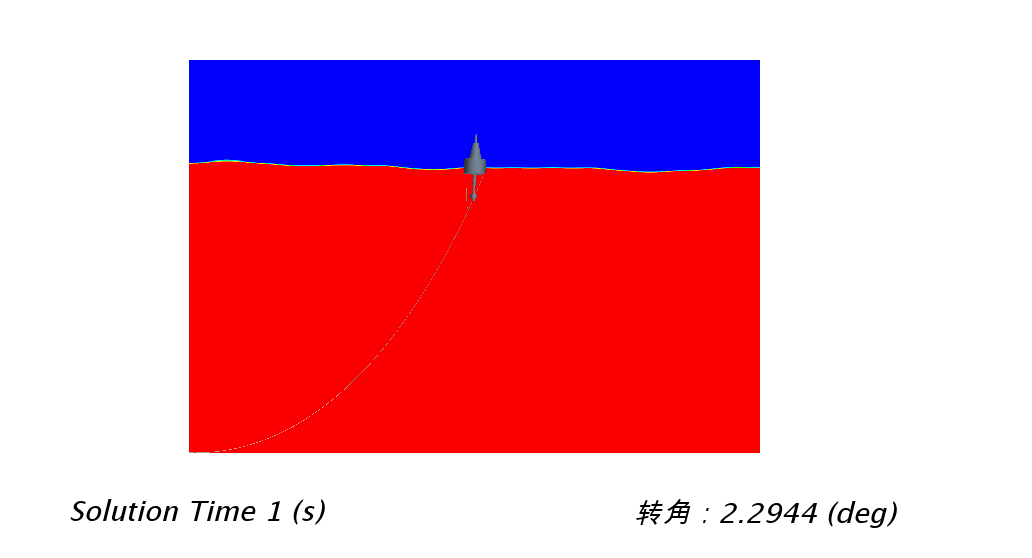
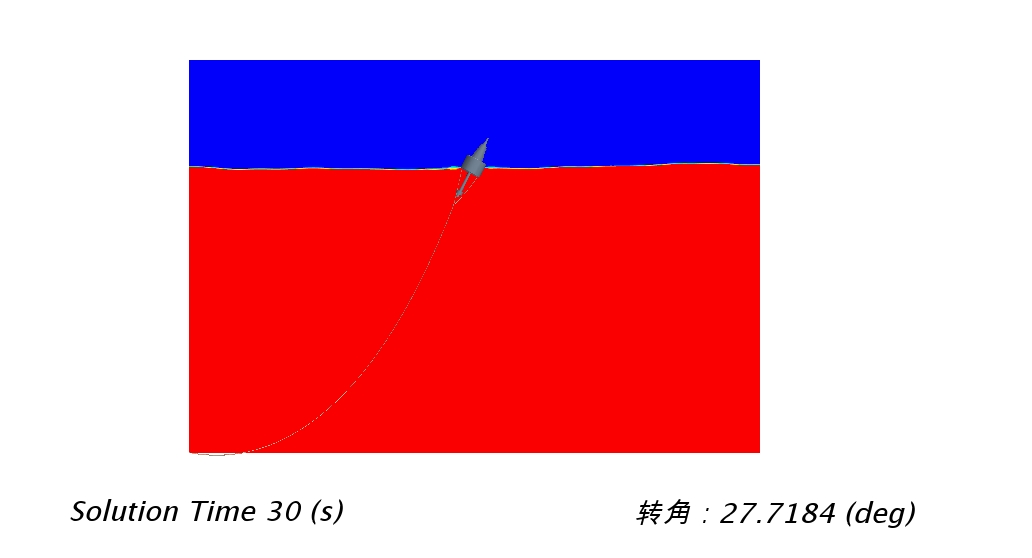
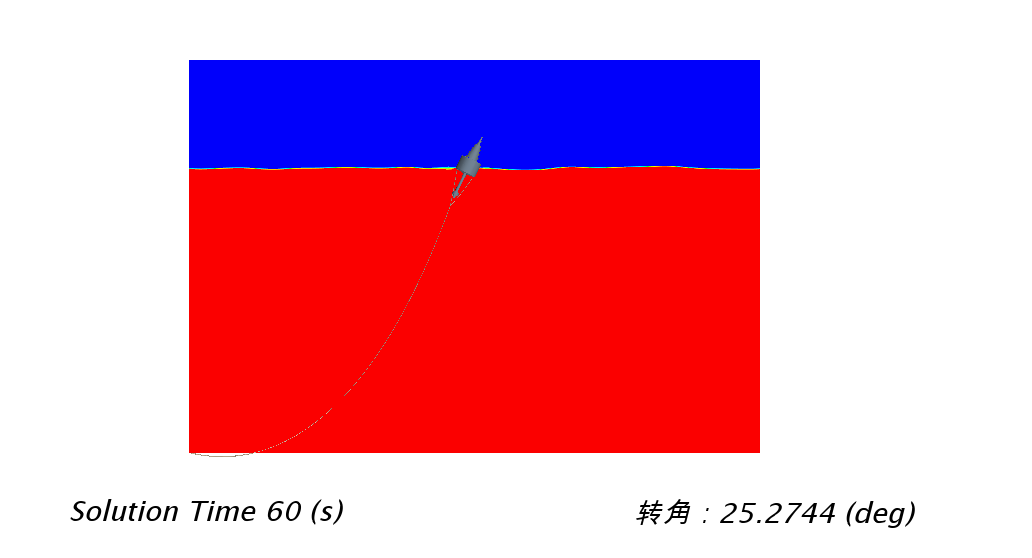
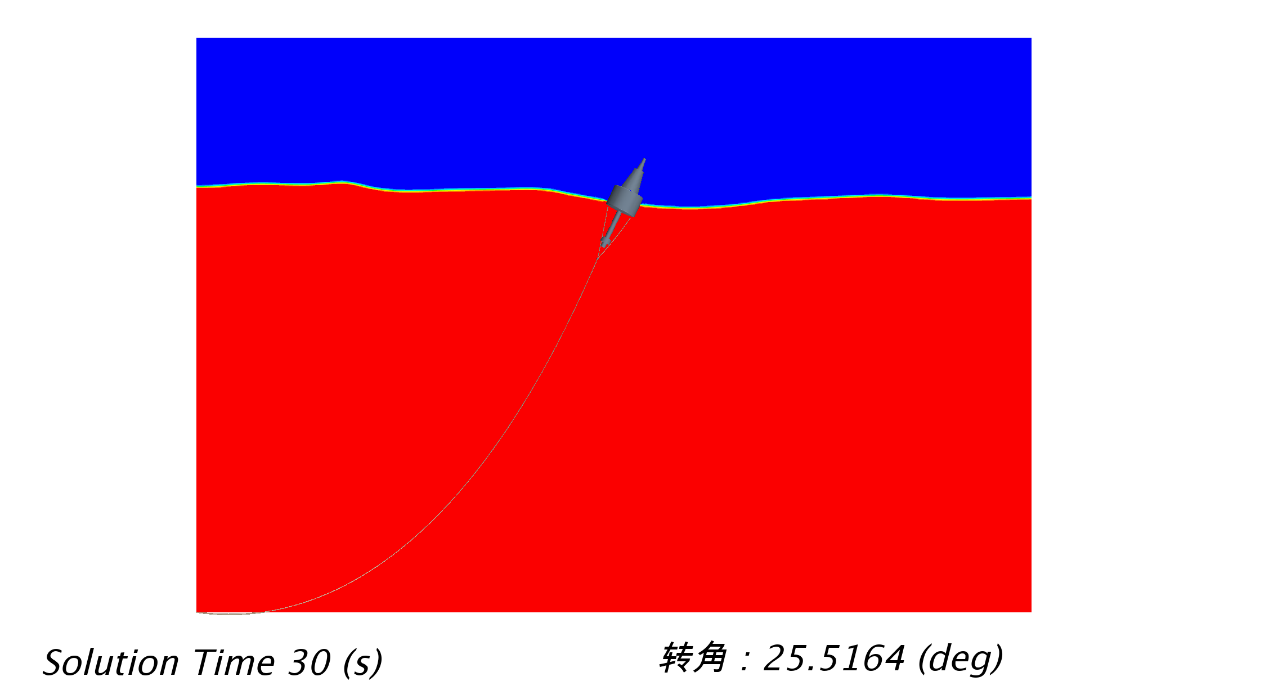
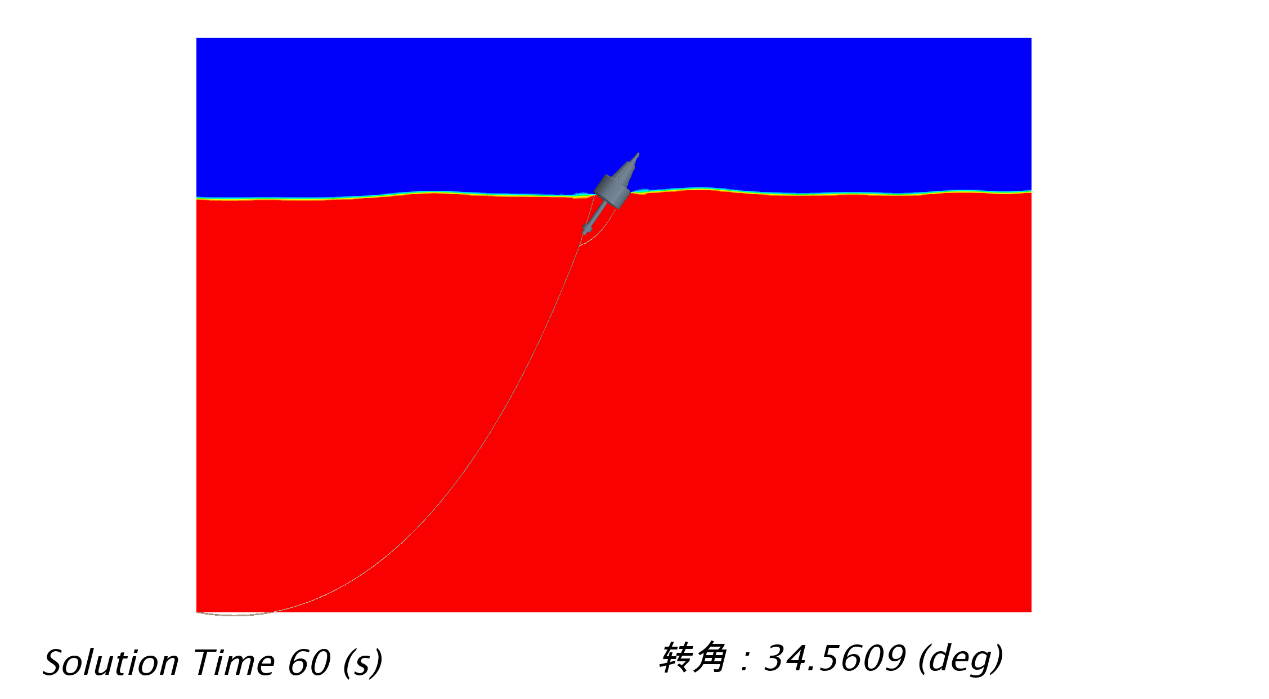
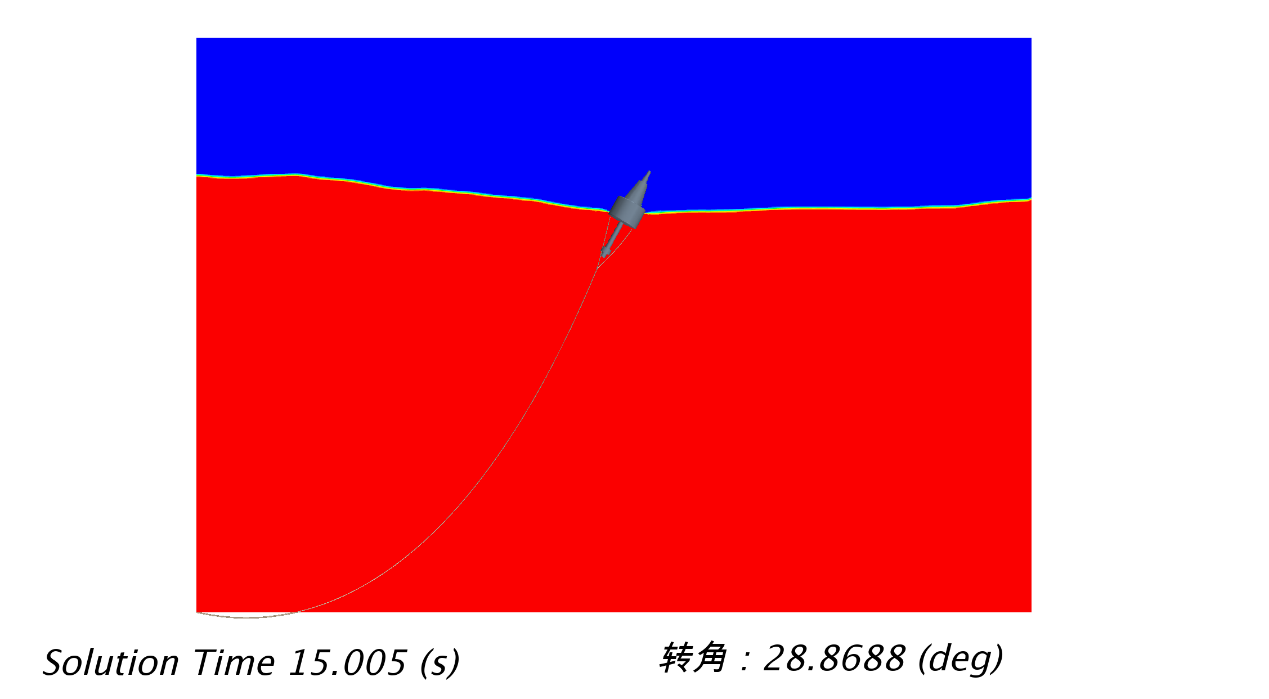
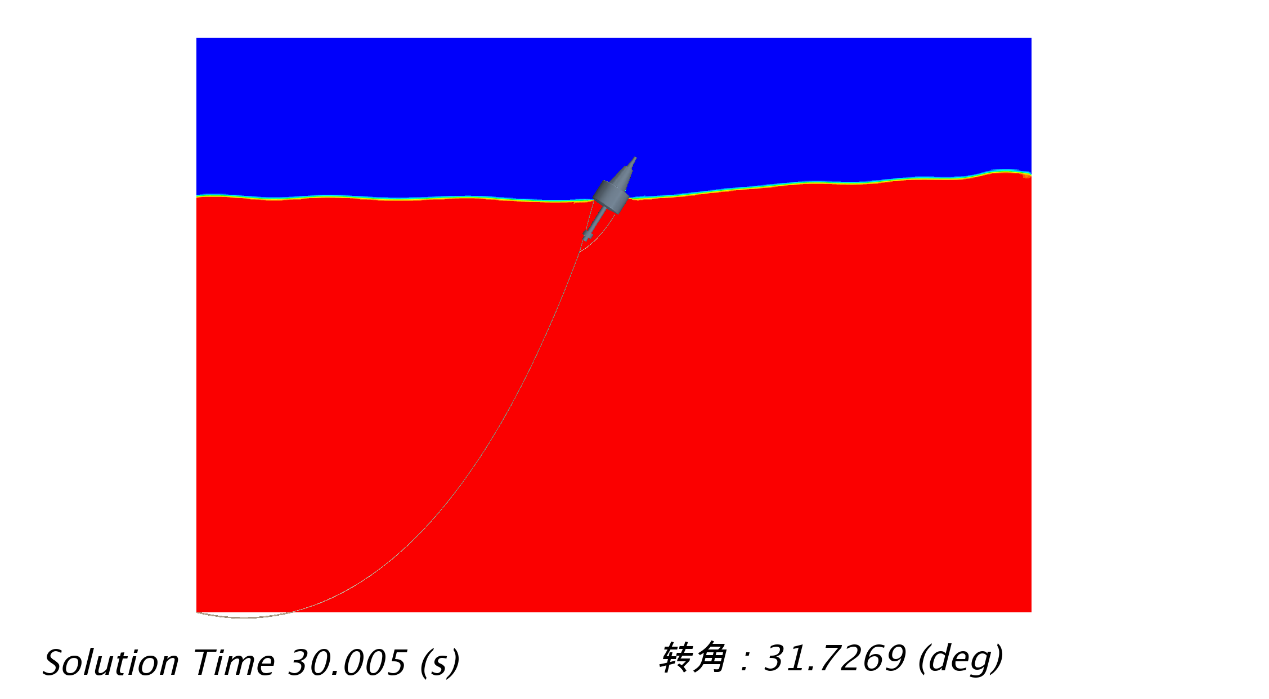
3.3 流场变化特征
图13~15给出了三、四、五级海况典型时刻浮标的姿态以及自由液面的变化特征。从图中可以更加直观的看到浮体的姿态变化。

t=0s t=15s
t=30s t=60s
图13三级海况下典型时刻浮标姿态和自由液面


t=0s t=15s
t=30s t=60s
图14四级海况下典型时刻浮标姿态和自由液面

t=0s t=15s

t=30s t=60s
图15五级海况下典型时刻浮标姿态和自由液面
4 结论
模型底部锚泊链固定,三、四、五级海况的浮体抗浪特性模拟。模拟结果表明:浮体的升沉和俯仰发生明显的周期性变化特征,浮标的姿态(升沉、俯仰)变化幅值随遭遇海况的等级增大而增大。五级海况下,质心约在-3.23m~3.92m之间周期性变化,俯仰较大约在15.19°~47.77°之间周期性变化。
参考文献
崔乃刚,曹春泉,韦常柱. 潜射导弹水下运动过程仿真分析.弹道学报. 第21卷第2期.2009年6月
刘曜.波浪对运载器出水姿态角的影响[J].舰船科学技术.2005,27(3):32—34.
NUMECA International User Manual FINE/Marine v3.1
Equipe Dynamique des Systèmes Propulsifs Marins, Theoretical Manual ISIS-CFD v3.1Ecole Centrale de Nantes, B.P. 92101, 44321 Nantes Cedex 3, France.
Kam W. Ng. Overview and Future Research Directions of Undersea Weapon Design & Optimization.9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization.2002:12~14
D.M.Halsmer, D.L.Mingofi.Nutational Stability and Passive Control of Spinning Rockets with Internal Mass Motion. Journal of Guidance, Control and Dynamics.1995, 18(5):2~4
Y.Yam, D.L.Mingon. Stability of a Spinning Axisymmetric Rocket with Dissipative Intern al Mass Motion. Journal of Guidance, Control and Dynamics.1997, 20(2):6~9
Lan Yamei. Liu Hua. Xue Leiping. Chen Gang. An Experimental Study on Vertical Hydrodynamic Force on A Circular Slab Near Free Surface by Water Waves. Journal of hydrodynamics. 2006, 18(2):184~191

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号





